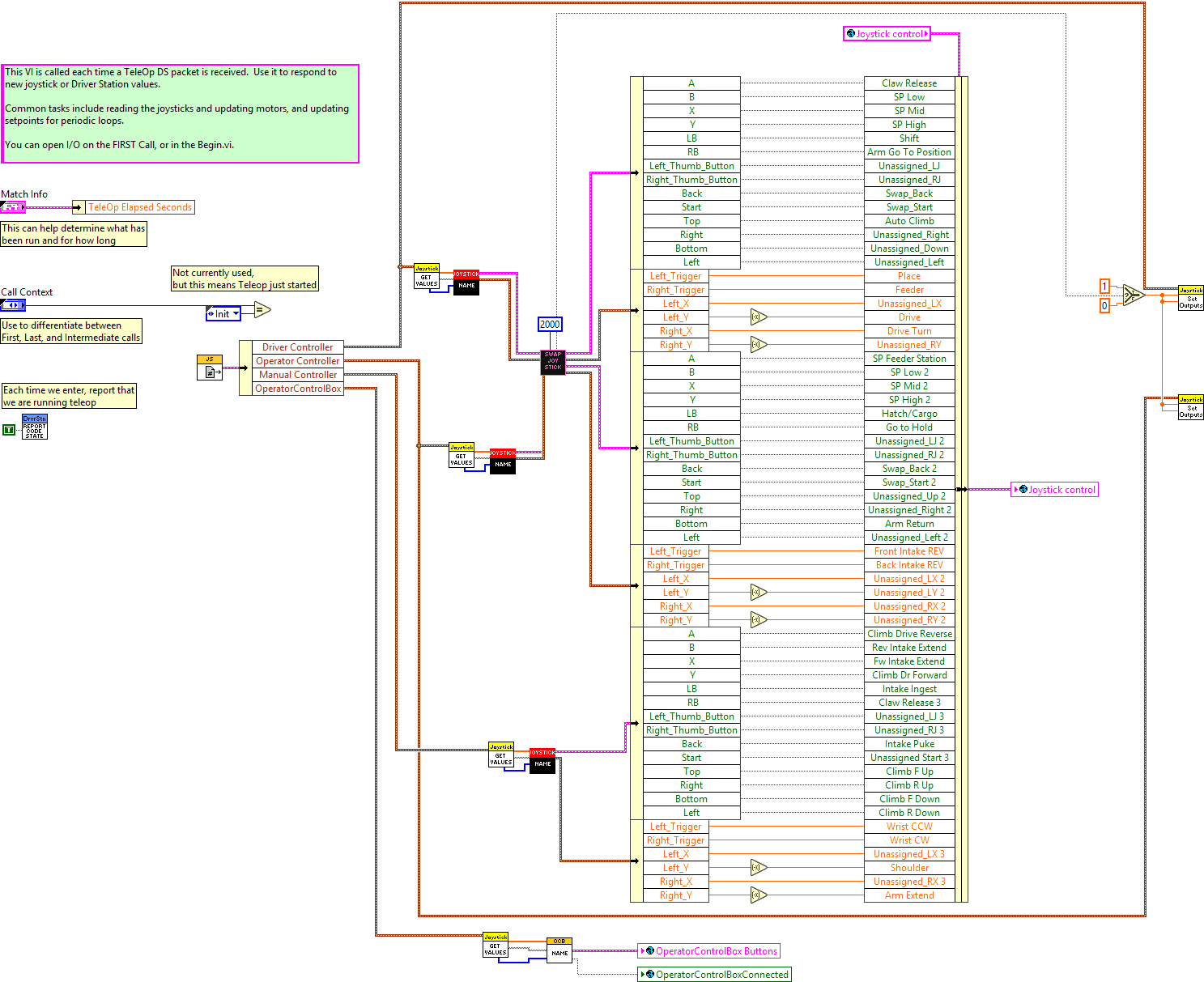
This VI is called for each TeleOp packet received from the DS where the robot is not disabled. It is often used to read from the joysticks and update I/O or to update setpoints for timed control loops. It should complete and return within 20 milliseconds or it may miss DS packets.
|
|
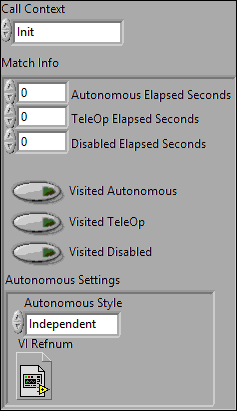
Call Context Derived Robot State returns the allowed derived robot state for the current phase of competition. Options include Init, Execute, and Stop. |
|
|
Match Info |
|
|
Autonomous Elapsed Seconds |
|
|
TeleOp Elapsed Seconds |
|
|
Disabled Elapsed Seconds |
|
|
Visited Autonomous |
|
|
Visited TeleOp |
|
|
Visited Disabled |
|
|
Autonomous Settings |
|
|
Autonomous Style |
|
|
VI Refnum |
"Teleop.vi History"
Current Revision: 193