
|
|
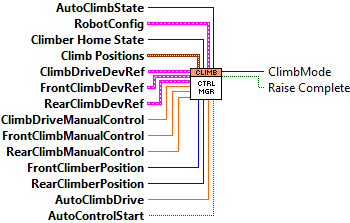
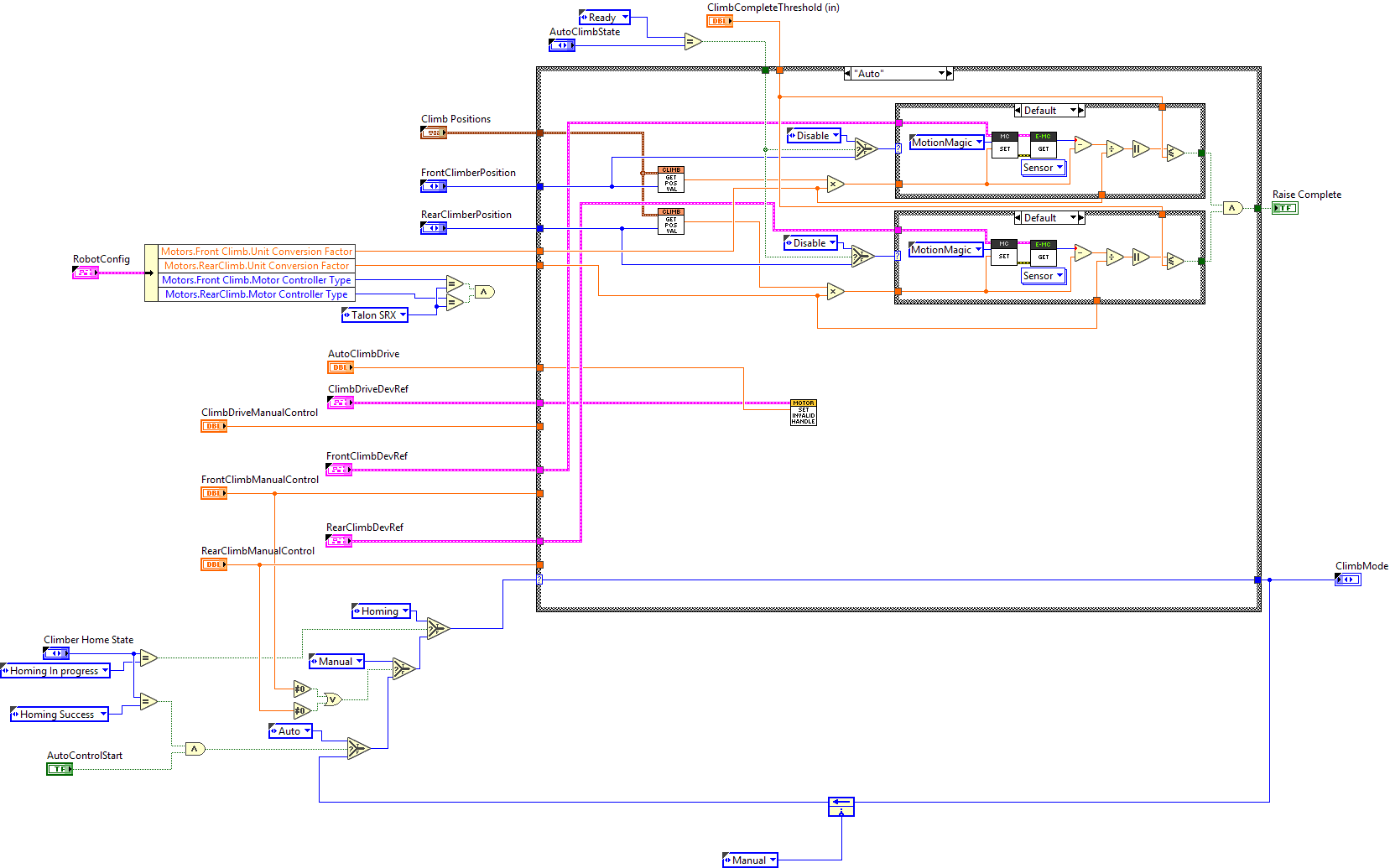
ClimbDriveDevRef MotorControlDevRef specifies a reference to the motor controller you want to use. |
|
|
DeviceStatus |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
Type |
|
|
PWM |
|
|
PWM Channel |
|
|
DeadBand |
|
|
Name |
|
|
maxPositivePwm |
|
|
minPositivePwm |
|
|
centerPwm |
|
|
maxNegativePwm |
|
|
minNegativePwm |
|
|
angularRange |
|
|
CAN |
|
|
Device Number |
|
|
SetOutput VI Ref |
|
|
GetOutput VI Ref |
|
|
Enable VI Ref |
|
|
Disable VI Ref |
|
|
Data |
|
|
Invert |
|
|
DIO PWM |
|
|
PWM "Enable" Channel |
|
|
DIO Channel |
|
|
PWM Rate |
|
|
FrontClimbDevRef MotorControlDevRef specifies a reference to the motor controller you want to use. |
|
|
DeviceStatus |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
Type |
|
|
PWM |
|
|
PWM Channel |
|
|
DeadBand |
|
|
Name |
|
|
maxPositivePwm |
|
|
minPositivePwm |
|
|
centerPwm |
|
|
maxNegativePwm |
|
|
minNegativePwm |
|
|
angularRange |
|
|
CAN |
|
|
Device Number |
|
|
SetOutput VI Ref |
|
|
GetOutput VI Ref |
|
|
Enable VI Ref |
|
|
Disable VI Ref |
|
|
Data |
|
|
Invert |
|
|
DIO PWM |
|
|
PWM "Enable" Channel |
|
|
DIO Channel |
|
|
PWM Rate |
|
|
RearClimbDevRef MotorControlDevRef specifies a reference to the motor controller you want to use. |
|
|
DeviceStatus |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
Type |
|
|
PWM |
|
|
PWM Channel |
|
|
DeadBand |
|
|
Name |
|
|
maxPositivePwm |
|
|
minPositivePwm |
|
|
centerPwm |
|
|
maxNegativePwm |
|
|
minNegativePwm |
|
|
angularRange |
|
|
CAN |
|
|
Device Number |
|
|
SetOutput VI Ref |
|
|
GetOutput VI Ref |
|
|
Enable VI Ref |
|
|
Disable VI Ref |
|
|
Data |
|
|
Invert |
|
|
DIO PWM |
|
|
PWM "Enable" Channel |
|
|
DIO Channel |
|
|
PWM Rate |
|
|
ClimbDriveManualControl Output specifies the output value or set-point for the motor controller. If you use a Jaguar or Victor motor controller connected to PWM, the scaled value can range from -1.0 to 1.0. If you use a CAN Jaguar, the scale and the units depend on the mode the Jaguar is in. In Percent VBus mode, the range is the same as the PWM interface. In Voltage, Current, Speed, and Position modes, the Output is specified in engineering units (Volts, Amps, Rotations/Minute, and Rotations respectively). |
|
|
FrontClimbManualControl Output specifies the output value or set-point for the motor controller. If you use a Jaguar or Victor motor controller connected to PWM, the scaled value can range from -1.0 to 1.0. If you use a CAN Jaguar, the scale and the units depend on the mode the Jaguar is in. In Percent VBus mode, the range is the same as the PWM interface. In Voltage, Current, Speed, and Position modes, the Output is specified in engineering units (Volts, Amps, Rotations/Minute, and Rotations respectively). |
|
|
RearClimbManualControl Output specifies the output value or set-point for the motor controller. If you use a Jaguar or Victor motor controller connected to PWM, the scaled value can range from -1.0 to 1.0. If you use a CAN Jaguar, the scale and the units depend on the mode the Jaguar is in. In Percent VBus mode, the range is the same as the PWM interface. In Voltage, Current, Speed, and Position modes, the Output is specified in engineering units (Volts, Amps, Rotations/Minute, and Rotations respectively). |
|
|
Climber Home State |
|
|
Climb Positions |
|
|
Retract |
|
|
Level 2 |
|
|
Level 3 |
|
|
FrontClimberPosition |
|
|
RearClimberPosition |
|
|
AutoClimbDrive |
|
|
AutoControlStart |
|
|
RobotConfig |
|
|
Motors |
|
|
DriveRightPrimary |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuos Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
DriveRightSecondary |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuos Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
DriveLeftPrimary |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuos Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
DriveLeftSecondary |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuos Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
RearClimb |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuos Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
Front Climb |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuos Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
Climb Drive |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuos Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
Shoulder1 |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuos Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
Shoulder2 |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuos Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
Wrist |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuos Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
Extension |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuos Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
CargoIntake |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuos Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
Intake2 |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuos Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
Sensors |
|
|
IMU |
|
|
Yaw Axis |
|
|
SPI Chip Select |
|
|
AHRS Algorithm |
|
|
Calibration Time (s) |
|
|
Calibrate On Open |
|
|
HomingButton |
|
|
DIO Channel |
|
|
Active Low |
|
|
HomingLED_Green |
|
|
DIO Channel |
|
|
Active Low |
|
|
HomingLED_Yellow |
|
|
DIO Channel |
|
|
Active Low |
|
|
HomingLED_Red |
|
|
DIO Channel |
|
|
Active Low |
|
|
PID |
|
|
FrontClimb |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
RearClimb |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
ArmShoulder |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
ArmExtend |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
ArmWrist |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
Solenoids |
|
|
Shifter |
|
|
Solenoid Channel |
|
|
Invert |
|
|
Hatch Grip |
|
|
Solenoid Channel |
|
|
Invert |
|
|
Hatch Extend |
|
|
Solenoid Channel |
|
|
Invert |
|
|
Manipulator Slide |
|
|
Solenoid Channel |
|
|
Invert |
|
|
Hatch Floor Intake |
|
|
Solenoid Channel |
|
|
Invert |
|
|
Enable Compressor |
|
|
MotionMagic |
|
|
FrontClimbExtend |
|
|
CruiseVelocity |
|
|
Acceleration |
|
|
RearClimbExtend |
|
|
CruiseVelocity |
|
|
Acceleration |
|
|
FrontClimbRetract |
|
|
CruiseVelocity |
|
|
Acceleration |
|
|
RearClimbRetract |
|
|
CruiseVelocity |
|
|
Acceleration |
|
|
RobotDimensions |
|
|
Length (in) |
|
|
Shoulder Height (in) |
|
|
Frame Height (in) |
|
|
Arm Center to Front of Robot (in) |
|
|
Arm Min Extension (in) |
|
|
Arm Max Extension (in) |
|
|
Cargo Intake Loop Length (in) |
|
|
Cargo Intake Loop Width (in) |
|
|
Cargo Intake Loop Offset (in) |
|
|
Cargo Intake Loop Angle (rad) |
|
|
Arm Home Position |
|
|
Radius (in) |
|
|
ShoulderAngle (rad) |
|
|
WristAngle (rad) |
|
|
Climb Home Position |
|
|
Back Climb |
|
|
Front Climb |
|
|
Climb Positions |
|
|
Retract |
|
|
Level 2 |
|
|
Level 3 |
|
|
AutoClimbState |
|
|
ClimbCompleteThreshold (in) |
|
|
ClimbMode |
|
|
Raise Complete |
"ClimberControlManager.vi History"
Current Revision: 14