|
|
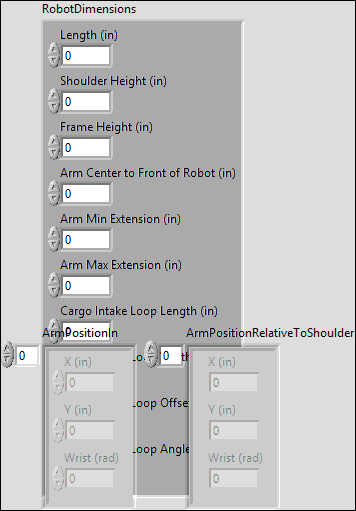
RobotDimensions |
|
|
Length (in) |
|
|
Shoulder Height (in) |
|
|
Frame Height (in) |
|
|
Arm Center to Front of Robot (in) |
|
|
Arm Min Extension (in) |
|
|
Arm Max Extension (in) |
|
|
Cargo Intake Loop Length (in) |
|
|
Cargo Intake Loop Width (in) |
|
|
Cargo Intake Loop Offset (in) |
|
|
Cargo Intake Loop Angle (rad) |
|
|
ArmPositionIn |
|
|
ArmPositionIn |
|
|
X (in) |
|
|
Y (in) |
|
|
Wrist (rad) |
|
|
ArmPositionRelativeToShoulder |
|
|
ArmPositionRelativeToShoulder |
|
|
X (in) |
|
|
Y (in) |
|
|
Wrist (rad) |
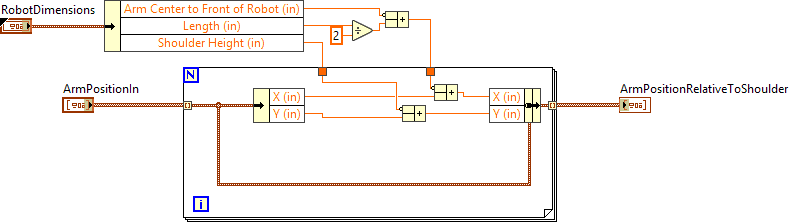
"CoordinateConvert_WorldCartesianToShoulderOriginCartesian_Array.vi History"
Current Revision: 7