|
|
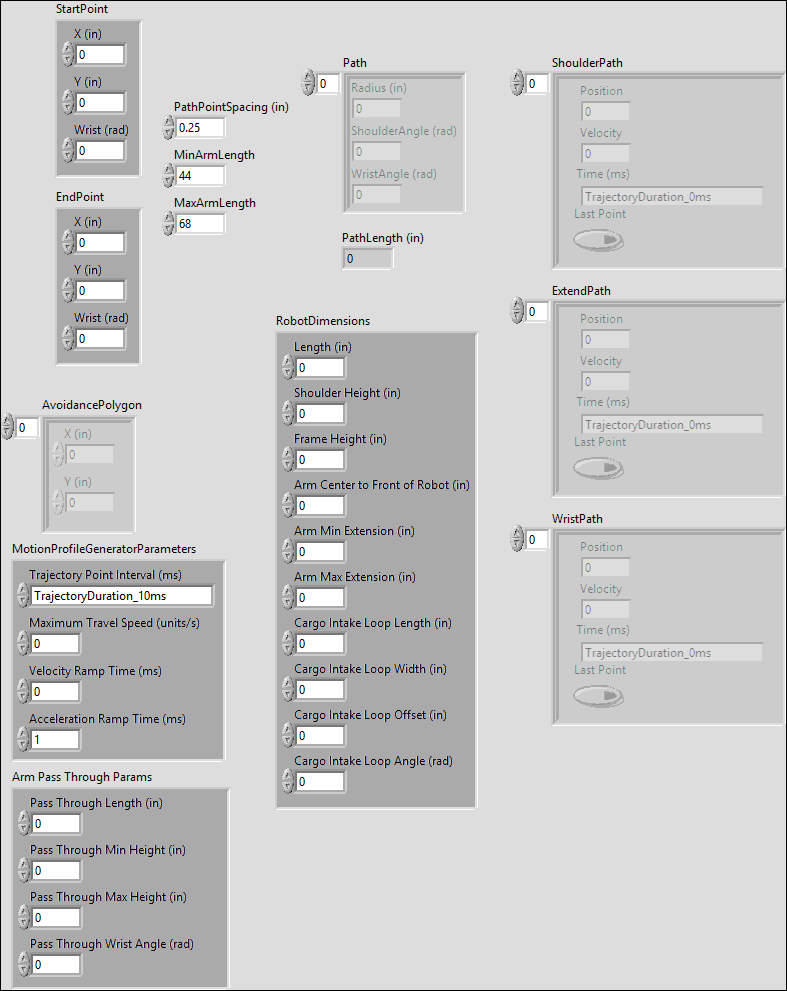
MinArmLength |
|
|
MaxArmLength |
|
|
PathPointSpacing (in) |
|
|
StartPoint |
|
|
X (in) |
|
|
Y (in) |
|
|
Wrist (rad) |
|
|
EndPoint |
|
|
X (in) |
|
|
Y (in) |
|
|
Wrist (rad) |
|
|
AvoidancePolygon |
|
|
2DPoint |
|
|
X (in) |
|
|
Y (in) |
|
|
MotionProfileGeneratorParameters |
|
|
Trajectory Point Interval (ms) |
|
|
Maximum Travel Speed (units/s) |
|
|
Velocity Ramp Time (ms) |
|
|
Acceleration Ramp Time (ms) |
|
|
RobotDimensions |
|
|
Length (in) |
|
|
Shoulder Height (in) |
|
|
Frame Height (in) |
|
|
Arm Center to Front of Robot (in) |
|
|
Arm Min Extension (in) |
|
|
Arm Max Extension (in) |
|
|
Cargo Intake Loop Length (in) |
|
|
Cargo Intake Loop Width (in) |
|
|
Cargo Intake Loop Offset (in) |
|
|
Cargo Intake Loop Angle (rad) |
|
|
Arm Pass Through Params |
|
|
Pass Through Length (in) |
|
|
Pass Through Min Height (in) |
|
|
Pass Through Max Height (in) |
|
|
Pass Through Wrist Angle (rad) |
|
|
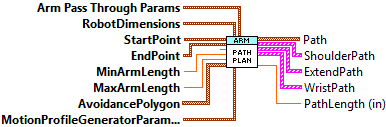
PathLength (in) |
|
|
Path |
|
|
Point |
|
|
Radius (in) |
|
|
ShoulderAngle (rad) |
|
|
WristAngle (rad) |
|
|
ShoulderPath |
|
|
trajectory point |
|
|
Position |
|
|
Velocity |
|
|
Time (ms) |
|
|
Last Point |
|
|
ExtendPath |
|
|
trajectory point |
|
|
Position |
|
|
Velocity |
|
|
Time (ms) |
|
|
Last Point |
|
|
WristPath |
|
|
trajectory point |
|
|
Position |
|
|
Velocity |
|
|
Time (ms) |
|
|
Last Point |
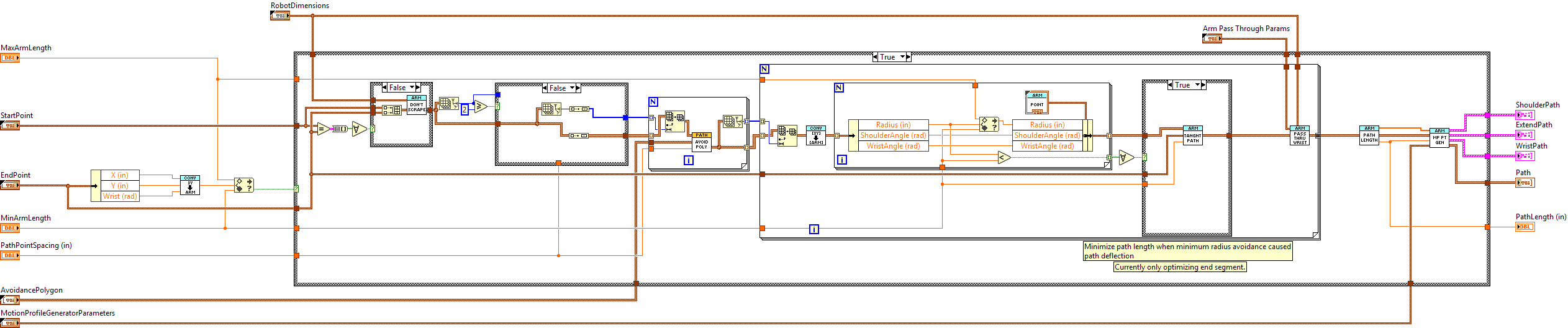

"ArmPathPlanner.vi History"
Current Revision: 50