|
|
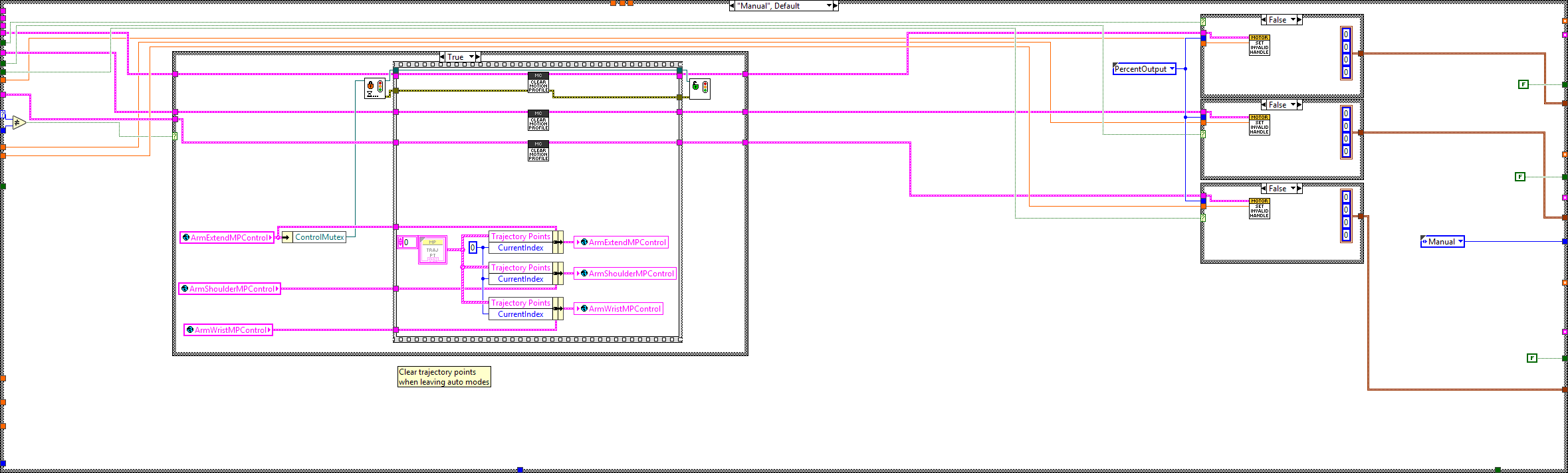
Arm Extend Manual Control |
|
|
Arm Shoulder Manual Control |
|
|
Arm Extend Motion Profile |
|
|
trajectory point |
|
|
Position |
|
|
Velocity |
|
|
Time (ms) |
|
|
Last Point |
|
|
Arm Shoulder Motion Profile |
|
|
trajectory point |
|
|
Position |
|
|
Velocity |
|
|
Time (ms) |
|
|
Last Point |
|
|
New Motion Profile |
|
|
Arm Shoulder Motor DevRef |
|
|
DeviceStatus |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
Type |
|
|
PWM |
|
|
PWM Channel |
|
|
DeadBand |
|
|
Name |
|
|
maxPositivePwm |
|
|
minPositivePwm |
|
|
centerPwm |
|
|
maxNegativePwm |
|
|
minNegativePwm |
|
|
angularRange |
|
|
CAN |
|
|
Device Number |
|
|
SetOutput VI Ref |
|
|
GetOutput VI Ref |
|
|
Enable VI Ref |
|
|
Disable VI Ref |
|
|
Data |
|
|
Invert |
|
|
DIO PWM |
|
|
PWM "Enable" Channel |
|
|
DIO Channel |
|
|
PWM Rate |
|
|
Arm Extend Motor DevRef |
|
|
DeviceStatus |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
Type |
|
|
PWM |
|
|
PWM Channel |
|
|
DeadBand |
|
|
Name |
|
|
maxPositivePwm |
|
|
minPositivePwm |
|
|
centerPwm |
|
|
maxNegativePwm |
|
|
minNegativePwm |
|
|
angularRange |
|
|
CAN |
|
|
Device Number |
|
|
SetOutput VI Ref |
|
|
GetOutput VI Ref |
|
|
Enable VI Ref |
|
|
Disable VI Ref |
|
|
Data |
|
|
Invert |
|
|
DIO PWM |
|
|
PWM "Enable" Channel |
|
|
DIO Channel |
|
|
PWM Rate |
|
|
ClearMotionProfile |
|
|
Reset Shoulder Rotate Max |
|
|
Reset Extend Max |
|
|
Reset Extend Sensor |
|
|
Reset Shoulder Rotate Sensor |
|
|
Extend Sensor Unit Coversion (ticks/in) |
|
|
Shoulder Sensor Unit Conversion (ticks/rad) |
|
|
Extend Position (in) |
|
|
Rotate Shoulder Position (rad) |
|
|
Tab Control |
|
|
ShoulderErrorThresh (rad) |
|
|
ExtendErrorThresh (in) |
|
|
StallDetectTime(ms) |
|
|
EnableStallDetection |
|
|
MP State Timeout (ms) |
|
|
ArmCompleteNotifier |
|
|
Arm Wrist Manual Control |
|
|
Wrist Sensor Unit Coversion (ticks/rad) |
|
|
Arm Wrist Motion Profile |
|
|
trajectory point |
|
|
Position |
|
|
Velocity |
|
|
Time (ms) |
|
|
Last Point |
|
|
Arm Wrist Motor DevRef |
|
|
DeviceStatus |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
Type |
|
|
PWM |
|
|
PWM Channel |
|
|
DeadBand |
|
|
Name |
|
|
maxPositivePwm |
|
|
minPositivePwm |
|
|
centerPwm |
|
|
maxNegativePwm |
|
|
minNegativePwm |
|
|
angularRange |
|
|
CAN |
|
|
Device Number |
|
|
SetOutput VI Ref |
|
|
GetOutput VI Ref |
|
|
Enable VI Ref |
|
|
Disable VI Ref |
|
|
Data |
|
|
Invert |
|
|
DIO PWM |
|
|
PWM "Enable" Channel |
|
|
DIO Channel |
|
|
PWM Rate |
|
|
Reset Wrist Rotate Max |
|
|
Rotate Wrist Position (rad) |
|
|
Reset Wrist Rotate Sensor |
|
|
WristErrorThresh (rad) |
|
|
RobotConfig |
|
|
Motors |
|
|
DriveRightPrimary |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuos Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
DriveRightSecondary |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuos Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
DriveLeftPrimary |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuos Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
DriveLeftSecondary |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuos Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
RearClimb |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuos Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
Front Climb |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuos Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
Climb Drive |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuos Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
Shoulder1 |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuos Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
Shoulder2 |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuos Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
Wrist |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuos Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
Extension |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuos Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
CargoIntake |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuos Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
Intake2 |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Peak Current (A) |
|
|
Continuos Current (A) |
|
|
Peak Duration (ms) |
|
|
Current Limit Enable |
|
|
Sensors |
|
|
IMU |
|
|
Yaw Axis |
|
|
SPI Chip Select |
|
|
AHRS Algorithm |
|
|
Calibration Time (s) |
|
|
Calibrate On Open |
|
|
HomingButton |
|
|
DIO Channel |
|
|
Active Low |
|
|
HomingLED_Green |
|
|
DIO Channel |
|
|
Active Low |
|
|
HomingLED_Yellow |
|
|
DIO Channel |
|
|
Active Low |
|
|
HomingLED_Red |
|
|
DIO Channel |
|
|
Active Low |
|
|
PID |
|
|
FrontClimb |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
RearClimb |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
ArmShoulder |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
ArmExtend |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
ArmWrist |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
Solenoids |
|
|
Shifter |
|
|
Solenoid Channel |
|
|
Invert |
|
|
Hatch Grip |
|
|
Solenoid Channel |
|
|
Invert |
|
|
Hatch Extend |
|
|
Solenoid Channel |
|
|
Invert |
|
|
Manipulator Slide |
|
|
Solenoid Channel |
|
|
Invert |
|
|
Hatch Floor Intake |
|
|
Solenoid Channel |
|
|
Invert |
|
|
Enable Compressor |
|
|
MotionMagic |
|
|
FrontClimbExtend |
|
|
CruiseVelocity |
|
|
Acceleration |
|
|
RearClimbExtend |
|
|
CruiseVelocity |
|
|
Acceleration |
|
|
FrontClimbRetract |
|
|
CruiseVelocity |
|
|
Acceleration |
|
|
RearClimbRetract |
|
|
CruiseVelocity |
|
|
Acceleration |
|
|
RobotDimensions |
|
|
Length (in) |
|
|
Shoulder Height (in) |
|
|
Frame Height (in) |
|
|
Arm Center to Front of Robot (in) |
|
|
Arm Min Extension (in) |
|
|
Arm Max Extension (in) |
|
|
Cargo Intake Loop Length (in) |
|
|
Cargo Intake Loop Width (in) |
|
|
Cargo Intake Loop Offset (in) |
|
|
Cargo Intake Loop Angle (rad) |
|
|
Arm Home Position |
|
|
Radius (in) |
|
|
ShoulderAngle (rad) |
|
|
WristAngle (rad) |
|
|
Climb Home Position |
|
|
Back Climb |
|
|
Front Climb |
|
|
Climb Positions |
|
|
Retract |
|
|
Level 2 |
|
|
Level 3 |
|
|
arm homing state |
|
|
Arm Control State |
|
|
ArmShoulder |
|
|
ArmExtension |
|
|
Extension |
|
|
Position (Sensor Units) |
|
|
Velocity (Sensor Units per 100 ms) |
|
|
Position (Raw Sensor Units) |
|
|
Velocity (Raw Sensor Units per 100 ms) |
|
|
ShoulderRotate |
|
|
Position (Sensor Units) |
|
|
Velocity (Sensor Units per 100 ms) |
|
|
Position (Raw Sensor Units) |
|
|
Velocity (Raw Sensor Units per 100 ms) |
|
|
ExtendFaults |
|
|
Under Voltage |
|
|
Forward Limit Switch |
|
|
Reverse Limit Switch |
|
|
Forward Soft Limit |
|
|
Reverse Soft Limit |
|
|
Hardware Failure |
|
|
Reset During Enable |
|
|
Sensor Overflow |
|
|
Sensor Out of Phase |
|
|
Hardware ESD Reset |
|
|
Remote Loss of Signal |
|
|
ShoulderRotate |
|
|
Top Buffer Remaining |
|
|
Top Buffer Count |
|
|
Bottom Buffer Count |
|
|
Has Underrun? |
|
|
Is Underrun? |
|
|
Active Point Valid? |
|
|
Is Last? |
|
|
Profile Slot Select 0 |
|
|
Output Enable |
|
|
Time Duration (ms) |
|
|
Profile Slot Select 1 |
|
|
Extension |
|
|
Top Buffer Remaining |
|
|
Top Buffer Count |
|
|
Bottom Buffer Count |
|
|
Has Underrun? |
|
|
Is Underrun? |
|
|
Active Point Valid? |
|
|
Is Last? |
|
|
Profile Slot Select 0 |
|
|
Output Enable |
|
|
Time Duration (ms) |
|
|
Profile Slot Select 1 |
|
|
ShoulderRotateFaults |
|
|
Under Voltage |
|
|
Forward Limit Switch |
|
|
Reverse Limit Switch |
|
|
Forward Soft Limit |
|
|
Reverse Soft Limit |
|
|
Hardware Failure |
|
|
Reset During Enable |
|
|
Sensor Overflow |
|
|
Sensor Out of Phase |
|
|
Hardware ESD Reset |
|
|
Remote Loss of Signal |
|
|
Max Extend Speed (Sensor Units per 100 ms) |
|
|
Max Shoulder Rotate Speed (Sensor Units per 100 ms) |
|
|
ArmExtensionV |
|
|
ArmShoulderV |
|
|
Arm Tracking |
|
|
MP Send State |
|
|
ArmWrist |
|
|
ArmWristV |
|
|
Max Wrist Rotate Speed (Sensor Units per 100 ms) |
|
|
WristRotateFaults |
|
|
Under Voltage |
|
|
Forward Limit Switch |
|
|
Reverse Limit Switch |
|
|
Forward Soft Limit |
|
|
Reverse Soft Limit |
|
|
Hardware Failure |
|
|
Reset During Enable |
|
|
Sensor Overflow |
|
|
Sensor Out of Phase |
|
|
Hardware ESD Reset |
|
|
Remote Loss of Signal |
|
|
WristRotate |
|
|
Top Buffer Remaining |
|
|
Top Buffer Count |
|
|
Bottom Buffer Count |
|
|
Has Underrun? |
|
|
Is Underrun? |
|
|
Active Point Valid? |
|
|
Is Last? |
|
|
Profile Slot Select 0 |
|
|
Output Enable |
|
|
Time Duration (ms) |
|
|
Profile Slot Select 1 |
|
|
WristRotate |
|
|
Position (Sensor Units) |
|
|
Velocity (Sensor Units per 100 ms) |
|
|
Position (Raw Sensor Units) |
|
|
Velocity (Raw Sensor Units per 100 ms) |
|
|
Sensor Reset Detected |
|
|
ExtendReset |
|
|
ShoulderReset |
|
|
WristReset |
|
|
ShoulderQuadPos |
|
|
ExtendQuadPos |
|
|
WristQuadPos |

"ArmControlManager.vi History"
Current Revision: 154