|
|
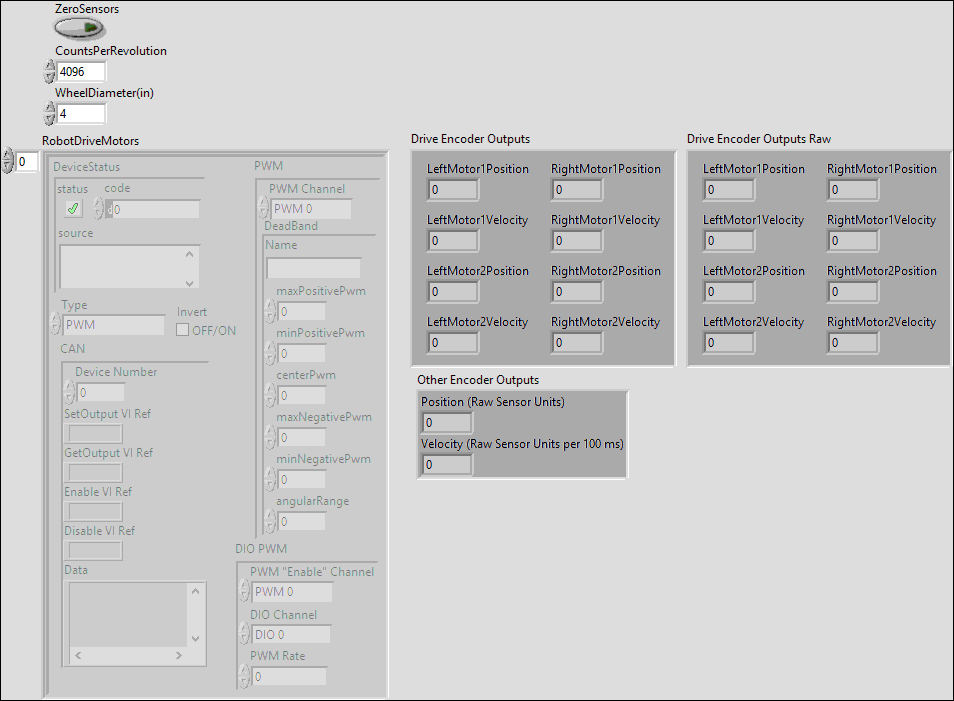
CountsPerRevolution |
|
|
WheelDiameter(in) |
|
|
RobotDriveMotors |
|
|
SingleMotorRef |
|
|
DeviceStatus |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
Type |
|
|
PWM |
|
|
PWM Channel |
|
|
DeadBand |
|
|
Name |
|
|
maxPositivePwm |
|
|
minPositivePwm |
|
|
centerPwm |
|
|
maxNegativePwm |
|
|
minNegativePwm |
|
|
angularRange |
|
|
CAN |
|
|
Device Number |
|
|
SetOutput VI Ref |
|
|
GetOutput VI Ref |
|
|
Enable VI Ref |
|
|
Disable VI Ref |
|
|
Data |
|
|
Invert |
|
|
DIO PWM |
|
|
PWM "Enable" Channel |
|
|
DIO Channel |
|
|
PWM Rate |
|
|
ZeroSensors |
|
|
Drive Encoder Outputs |
|
|
LeftMotor1Position |
|
|
LeftMotor1Velocity |
|
|
RightMotor1Velocity |
|
|
RightMotor1Position |
|
|
LeftMotor2Position |
|
|
LeftMotor2Velocity |
|
|
RightMotor2Position |
|
|
RightMotor2Velocity |
|
|
Other Encoder Outputs |
|
|
Position (Raw Sensor Units) |
|
|
Velocity (Raw Sensor Units per 100 ms) |
|
|
Drive Encoder Outputs Raw |
|
|
LeftMotor1Position |
|
|
LeftMotor1Velocity |
|
|
RightMotor1Velocity |
|
|
RightMotor1Position |
|
|
LeftMotor2Position |
|
|
LeftMotor2Velocity |
|
|
RightMotor2Position |
|
|
RightMotor2Velocity |
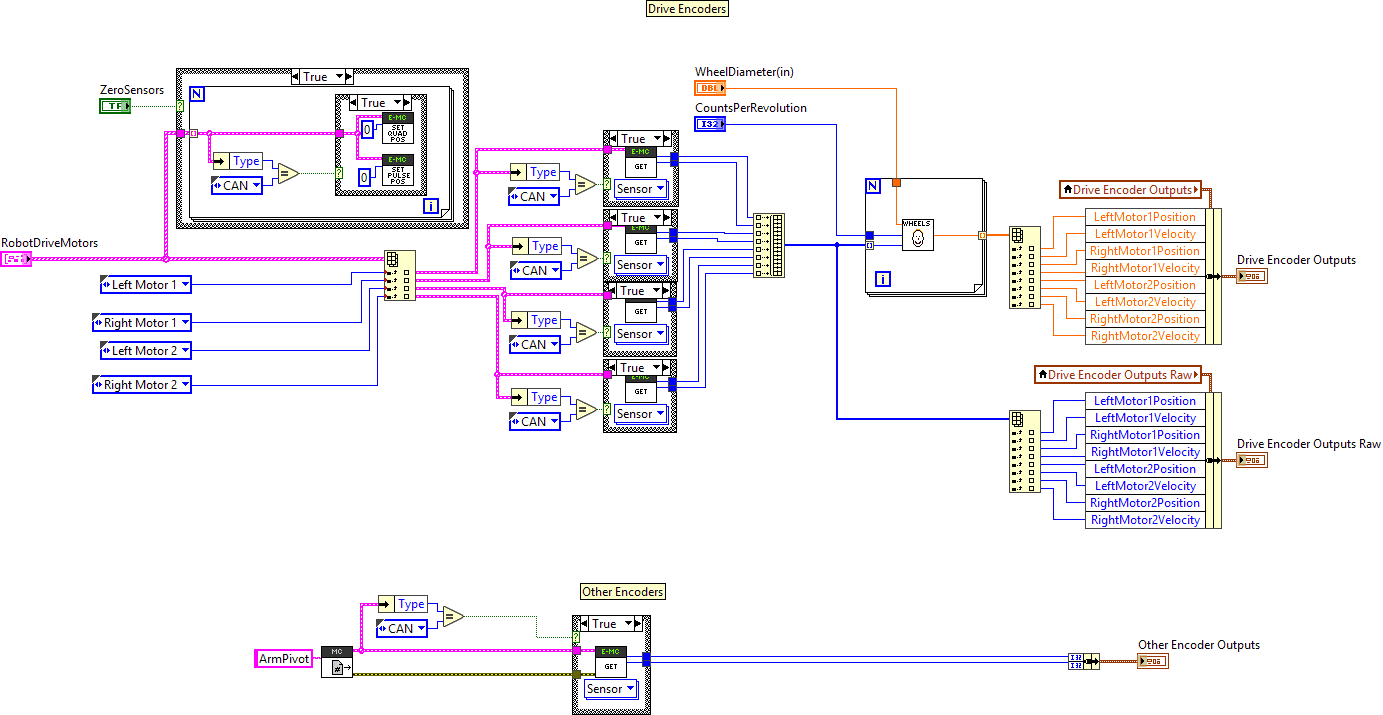




"TestDriveEncoders.vi History"
Current Revision: 11