|
|
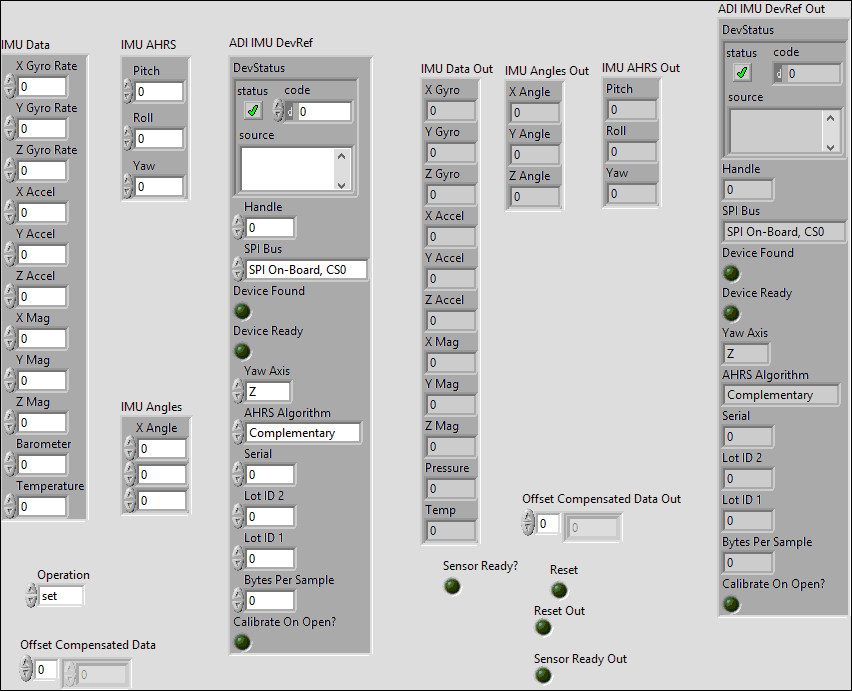
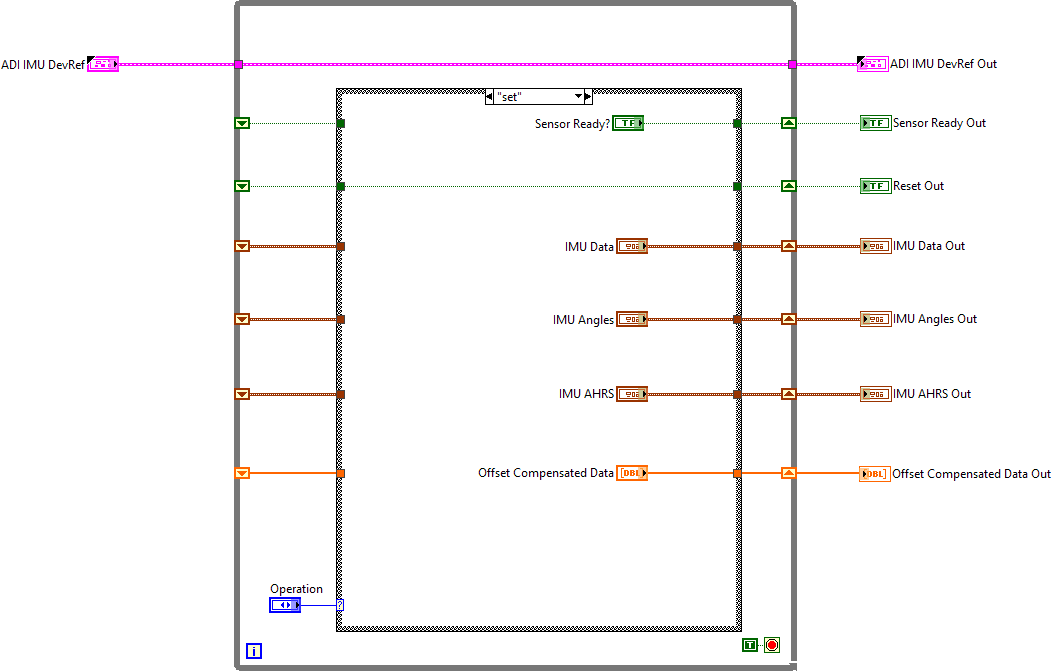
Operation |
|
|
IMU Data |
|
|
X Gyro Rate |
|
|
Y Gyro Rate |
|
|
Z Gyro Rate |
|
|
X Accel |
|
|
Y Accel |
|
|
Z Accel |
|
|
X Mag |
|
|
Y Mag |
|
|
Z Mag |
|
|
Barometer |
|
|
Temperature |
|
|
IMU Angles |
|
|
X Angle |
|
|
Y Angle |
|
|
Z Angle |
|
|
IMU AHRS |
|
|
Pitch |
|
|
Roll |
|
|
Yaw |
|
|
Sensor Ready? |
|
|
Reset |
|
|
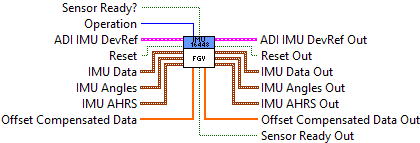
ADI IMU DevRef SPIDevRef specifies a reference to the SPI Engine you want to use. |
|
|
DevStatus error in describes error conditions occurring before the function executes. |
|
|
status status is TRUE if an error occurred. |
|
|
code code is the error or warning code. The default is 0. |
|
|
source source specifies the origin of the error or warning and is, in most cases, the name of the VI or function that produced the error or warning. The default is an empty string. |
|
|
Handle |
|
|
SPI Bus |
|
|
Device Found |
|
|
Device Ready |
|
|
Yaw Axis |
|
|
AHRS Algorithm |
|
|
Serial |
|
|
Lot ID 2 |
|
|
Lot ID 1 |
|
|
Bytes Per Sample |
|
|
Calibrate On Open? |
|
|
Offset Compensated Data |
|
|
mean |
|
|
Reset Out |
|
|
Sensor Ready Out |
|
|
IMU Data Out |
|
|
X Gyro |
|
|
Y Gyro |
|
|
Z Gyro |
|
|
X Accel |
|
|
Y Accel |
|
|
Z Accel |
|
|
X Mag |
|
|
Y Mag |
|
|
Z Mag |
|
|
Pressure |
|
|
Temp |
|
|
IMU Angles Out |
|
|
X Angle |
|
|
Y Angle |
|
|
Z Angle |
|
|
IMU AHRS Out |
|
|
Pitch |
|
|
Roll |
|
|
Yaw |
|
|
ADI IMU DevRef Out SPIDevRef specifies a reference to the SPI Engine you want to use. |
|
|
DevStatus error in describes error conditions occurring before the function executes. |
|
|
status status is TRUE if an error occurred. |
|
|
code code is the error or warning code. The default is 0. |
|
|
source source specifies the origin of the error or warning and is, in most cases, the name of the VI or function that produced the error or warning. The default is an empty string. |
|
|
Handle |
|
|
SPI Bus |
|
|
Device Found |
|
|
Device Ready |
|
|
Yaw Axis |
|
|
AHRS Algorithm |
|
|
Serial |
|
|
Lot ID 2 |
|
|
Lot ID 1 |
|
|
Bytes Per Sample |
|
|
Calibrate On Open? |
|
|
Offset Compensated Data Out |
|
|
mean |
"ADIS16448_IMU.lvlib:ADI_IMU_ADIS16448_FGV.vi History"
Current Revision: 76