|
|
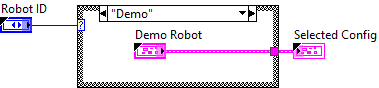
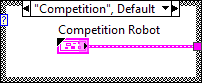
Robot ID |
|
|
Competition Robot |
|
|
Motors |
|
|
DriveLeftPrimary |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
DriveLeftSecondary1 |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
DriveRightPrimary |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
DriveRightSecondary1 |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
RightIntake |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
LeftIntake |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
ArmPivot |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
ArmExtend |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
ArmPivot2 |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Climber |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Selfie Stick |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Sensors |
|
|
IMU |
|
|
Yaw Axis |
|
|
SPI Chip Select |
|
|
AHRS Algorithm |
|
|
Calibration Time (s) |
|
|
Calibrate On Open |
|
|
LimitSwitch1 |
|
|
DIO Channel |
|
|
Active Low |
|
|
LimitSwitch2 |
|
|
DIO Channel |
|
|
Active Low |
|
|
BeamBreak |
|
|
DIO Channel |
|
|
Active Low |
|
|
JeVois |
|
|
Baud Rate Baud Rate specifies the rate of transmission. The default is 9600. |
|
|
Parity Parity specifies the parity type to use for the parity bit of each data character you want to transmit or receive. |
|
|
Data Bits Data Bits specifies the number of bits in each data character. The value of data bits is between five and eight. The default value is 8. |
|
|
Stop Bits Stop Bits specifies the number of stop bits that indicate the end of a data character. |
|
|
Termination Char (0xA = '\n' = LF) Termination Char (0xA = '\n' = LF) specifies a character that terminates the read operation. The default is 0xA, which specifies a line feed character. |
|
|
Enable Termination Char? (T) Enable Termination Char? (T) specifies, when TRUE, that the serial device terminates a read operation when it reads the Termination Char. The default is TRUE. |
|
|
Flow Control Flow Control specifies the type of control used by the transfer mechanism. |
|
|
Timeout Value (ms) Timeout Value (ms) specifies the minimum timeout value, in milliseconds, to use for the write and read operations. The default is 5000. |
|
|
Serial Port Serial Port specifies whether to use the Onboard or MXP serial port. |
|
|
PID |
|
|
ArmExtend |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
ArmRotate |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
Drive |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
DriveGyro Kp ((in/sec)/deg) |
|
|
CameraPole |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
Solenoids |
|
|
ArmClaw |
|
|
Forward Channel |
|
|
Invert |
|
|
Reverse Channel |
|
|
IntakeExtend |
|
|
Forward Channel |
|
|
Invert |
|
|
Reverse Channel |
|
|
IntakeOpen |
|
|
Forward Channel |
|
|
Invert |
|
|
Reverse Channel |
|
|
Shifter |
|
|
Forward Channel |
|
|
Invert |
|
|
Reverse Channel |
|
|
RobotDimensions |
|
|
Length |
|
|
Height |
|
|
HeightOfBumpers |
|
|
DistanceFromFrameEdgeToPyramid |
|
|
HeightOfFrameToIntake |
|
|
EdgeOfFrameToOrigin |
|
|
ArmHomePosition |
|
|
Angle (rad) |
|
|
Radius (in) |
|
|
SelfieStickParams |
|
|
Home Height (in) |
|
|
CruiseVelocity |
|
|
MaxAccel |
|
|
Low Height (in) |
|
|
High Height (in) |
|
|
Mid Height (in) |
|
|
Enable Compressor |
|
|
Practice Robot |
|
|
Motors |
|
|
DriveLeftPrimary |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
DriveLeftSecondary1 |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
DriveRightPrimary |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
DriveRightSecondary1 |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
RightIntake |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
LeftIntake |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
ArmPivot |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
ArmExtend |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
ArmPivot2 |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Climber |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Selfie Stick |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Sensors |
|
|
IMU |
|
|
Yaw Axis |
|
|
SPI Chip Select |
|
|
AHRS Algorithm |
|
|
Calibration Time (s) |
|
|
Calibrate On Open |
|
|
LimitSwitch1 |
|
|
DIO Channel |
|
|
Active Low |
|
|
LimitSwitch2 |
|
|
DIO Channel |
|
|
Active Low |
|
|
BeamBreak |
|
|
DIO Channel |
|
|
Active Low |
|
|
JeVois |
|
|
Baud Rate Baud Rate specifies the rate of transmission. The default is 9600. |
|
|
Parity Parity specifies the parity type to use for the parity bit of each data character you want to transmit or receive. |
|
|
Data Bits Data Bits specifies the number of bits in each data character. The value of data bits is between five and eight. The default value is 8. |
|
|
Stop Bits Stop Bits specifies the number of stop bits that indicate the end of a data character. |
|
|
Termination Char (0xA = '\n' = LF) Termination Char (0xA = '\n' = LF) specifies a character that terminates the read operation. The default is 0xA, which specifies a line feed character. |
|
|
Enable Termination Char? (T) Enable Termination Char? (T) specifies, when TRUE, that the serial device terminates a read operation when it reads the Termination Char. The default is TRUE. |
|
|
Flow Control Flow Control specifies the type of control used by the transfer mechanism. |
|
|
Timeout Value (ms) Timeout Value (ms) specifies the minimum timeout value, in milliseconds, to use for the write and read operations. The default is 5000. |
|
|
Serial Port Serial Port specifies whether to use the Onboard or MXP serial port. |
|
|
PID |
|
|
ArmExtend |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
ArmRotate |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
Drive |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
DriveGyro Kp ((in/sec)/deg) |
|
|
CameraPole |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
Solenoids |
|
|
ArmClaw |
|
|
Forward Channel |
|
|
Invert |
|
|
Reverse Channel |
|
|
IntakeExtend |
|
|
Forward Channel |
|
|
Invert |
|
|
Reverse Channel |
|
|
IntakeOpen |
|
|
Forward Channel |
|
|
Invert |
|
|
Reverse Channel |
|
|
Shifter |
|
|
Forward Channel |
|
|
Invert |
|
|
Reverse Channel |
|
|
RobotDimensions |
|
|
Length |
|
|
Height |
|
|
HeightOfBumpers |
|
|
DistanceFromFrameEdgeToPyramid |
|
|
HeightOfFrameToIntake |
|
|
EdgeOfFrameToOrigin |
|
|
ArmHomePosition |
|
|
Angle (rad) |
|
|
Radius (in) |
|
|
SelfieStickParams |
|
|
Home Height (in) |
|
|
CruiseVelocity |
|
|
MaxAccel |
|
|
Low Height (in) |
|
|
High Height (in) |
|
|
Mid Height (in) |
|
|
Enable Compressor |
|
|
Programming Robot |
|
|
Motors |
|
|
DriveLeftPrimary |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
DriveLeftSecondary1 |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
DriveRightPrimary |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
DriveRightSecondary1 |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
RightIntake |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
LeftIntake |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
ArmPivot |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
ArmExtend |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
ArmPivot2 |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Climber |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Selfie Stick |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Sensors |
|
|
IMU |
|
|
Yaw Axis |
|
|
SPI Chip Select |
|
|
AHRS Algorithm |
|
|
Calibration Time (s) |
|
|
Calibrate On Open |
|
|
LimitSwitch1 |
|
|
DIO Channel |
|
|
Active Low |
|
|
LimitSwitch2 |
|
|
DIO Channel |
|
|
Active Low |
|
|
BeamBreak |
|
|
DIO Channel |
|
|
Active Low |
|
|
JeVois |
|
|
Baud Rate Baud Rate specifies the rate of transmission. The default is 9600. |
|
|
Parity Parity specifies the parity type to use for the parity bit of each data character you want to transmit or receive. |
|
|
Data Bits Data Bits specifies the number of bits in each data character. The value of data bits is between five and eight. The default value is 8. |
|
|
Stop Bits Stop Bits specifies the number of stop bits that indicate the end of a data character. |
|
|
Termination Char (0xA = '\n' = LF) Termination Char (0xA = '\n' = LF) specifies a character that terminates the read operation. The default is 0xA, which specifies a line feed character. |
|
|
Enable Termination Char? (T) Enable Termination Char? (T) specifies, when TRUE, that the serial device terminates a read operation when it reads the Termination Char. The default is TRUE. |
|
|
Flow Control Flow Control specifies the type of control used by the transfer mechanism. |
|
|
Timeout Value (ms) Timeout Value (ms) specifies the minimum timeout value, in milliseconds, to use for the write and read operations. The default is 5000. |
|
|
Serial Port Serial Port specifies whether to use the Onboard or MXP serial port. |
|
|
PID |
|
|
ArmExtend |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
ArmRotate |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
Drive |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
DriveGyro Kp ((in/sec)/deg) |
|
|
CameraPole |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
Solenoids |
|
|
ArmClaw |
|
|
Forward Channel |
|
|
Invert |
|
|
Reverse Channel |
|
|
IntakeExtend |
|
|
Forward Channel |
|
|
Invert |
|
|
Reverse Channel |
|
|
IntakeOpen |
|
|
Forward Channel |
|
|
Invert |
|
|
Reverse Channel |
|
|
Shifter |
|
|
Forward Channel |
|
|
Invert |
|
|
Reverse Channel |
|
|
RobotDimensions |
|
|
Length |
|
|
Height |
|
|
HeightOfBumpers |
|
|
DistanceFromFrameEdgeToPyramid |
|
|
HeightOfFrameToIntake |
|
|
EdgeOfFrameToOrigin |
|
|
ArmHomePosition |
|
|
Angle (rad) |
|
|
Radius (in) |
|
|
SelfieStickParams |
|
|
Home Height (in) |
|
|
CruiseVelocity |
|
|
MaxAccel |
|
|
Low Height (in) |
|
|
High Height (in) |
|
|
Mid Height (in) |
|
|
Enable Compressor |
|
|
Demo Robot |
|
|
Motors |
|
|
DriveLeftPrimary |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
DriveLeftSecondary1 |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
DriveRightPrimary |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
DriveRightSecondary1 |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
RightIntake |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
LeftIntake |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
ArmPivot |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
ArmExtend |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
ArmPivot2 |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Climber |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Selfie Stick |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Sensors |
|
|
IMU |
|
|
Yaw Axis |
|
|
SPI Chip Select |
|
|
AHRS Algorithm |
|
|
Calibration Time (s) |
|
|
Calibrate On Open |
|
|
LimitSwitch1 |
|
|
DIO Channel |
|
|
Active Low |
|
|
LimitSwitch2 |
|
|
DIO Channel |
|
|
Active Low |
|
|
BeamBreak |
|
|
DIO Channel |
|
|
Active Low |
|
|
JeVois |
|
|
Baud Rate Baud Rate specifies the rate of transmission. The default is 9600. |
|
|
Parity Parity specifies the parity type to use for the parity bit of each data character you want to transmit or receive. |
|
|
Data Bits Data Bits specifies the number of bits in each data character. The value of data bits is between five and eight. The default value is 8. |
|
|
Stop Bits Stop Bits specifies the number of stop bits that indicate the end of a data character. |
|
|
Termination Char (0xA = '\n' = LF) Termination Char (0xA = '\n' = LF) specifies a character that terminates the read operation. The default is 0xA, which specifies a line feed character. |
|
|
Enable Termination Char? (T) Enable Termination Char? (T) specifies, when TRUE, that the serial device terminates a read operation when it reads the Termination Char. The default is TRUE. |
|
|
Flow Control Flow Control specifies the type of control used by the transfer mechanism. |
|
|
Timeout Value (ms) Timeout Value (ms) specifies the minimum timeout value, in milliseconds, to use for the write and read operations. The default is 5000. |
|
|
Serial Port Serial Port specifies whether to use the Onboard or MXP serial port. |
|
|
PID |
|
|
ArmExtend |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
ArmRotate |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
Drive |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
DriveGyro Kp ((in/sec)/deg) |
|
|
CameraPole |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
Solenoids |
|
|
ArmClaw |
|
|
Forward Channel |
|
|
Invert |
|
|
Reverse Channel |
|
|
IntakeExtend |
|
|
Forward Channel |
|
|
Invert |
|
|
Reverse Channel |
|
|
IntakeOpen |
|
|
Forward Channel |
|
|
Invert |
|
|
Reverse Channel |
|
|
Shifter |
|
|
Forward Channel |
|
|
Invert |
|
|
Reverse Channel |
|
|
RobotDimensions |
|
|
Length |
|
|
Height |
|
|
HeightOfBumpers |
|
|
DistanceFromFrameEdgeToPyramid |
|
|
HeightOfFrameToIntake |
|
|
EdgeOfFrameToOrigin |
|
|
ArmHomePosition |
|
|
Angle (rad) |
|
|
Radius (in) |
|
|
SelfieStickParams |
|
|
Home Height (in) |
|
|
CruiseVelocity |
|
|
MaxAccel |
|
|
Low Height (in) |
|
|
High Height (in) |
|
|
Mid Height (in) |
|
|
Enable Compressor |
|
|
Selected Config |
|
|
Motors |
|
|
DriveLeftPrimary |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
DriveLeftSecondary1 |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
DriveRightPrimary |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
DriveRightSecondary1 |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
RightIntake |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
LeftIntake |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
ArmPivot |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
ArmExtend |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
ArmPivot2 |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Climber |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Selfie Stick |
|
|
CAN Address |
|
|
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
Sensors |
|
|
IMU |
|
|
Yaw Axis |
|
|
SPI Chip Select |
|
|
AHRS Algorithm |
|
|
Calibration Time (s) |
|
|
Calibrate On Open |
|
|
LimitSwitch1 |
|
|
DIO Channel |
|
|
Active Low |
|
|
LimitSwitch2 |
|
|
DIO Channel |
|
|
Active Low |
|
|
BeamBreak |
|
|
DIO Channel |
|
|
Active Low |
|
|
JeVois |
|
|
Baud Rate Baud Rate specifies the rate of transmission. The default is 9600. |
|
|
Parity Parity specifies the parity type to use for the parity bit of each data character you want to transmit or receive. |
|
|
Data Bits Data Bits specifies the number of bits in each data character. The value of data bits is between five and eight. The default value is 8. |
|
|
Stop Bits Stop Bits specifies the number of stop bits that indicate the end of a data character. |
|
|
Termination Char (0xA = '\n' = LF) Termination Char (0xA = '\n' = LF) specifies a character that terminates the read operation. The default is 0xA, which specifies a line feed character. |
|
|
Enable Termination Char? (T) Enable Termination Char? (T) specifies, when TRUE, that the serial device terminates a read operation when it reads the Termination Char. The default is TRUE. |
|
|
Flow Control Flow Control specifies the type of control used by the transfer mechanism. |
|
|
Timeout Value (ms) Timeout Value (ms) specifies the minimum timeout value, in milliseconds, to use for the write and read operations. The default is 5000. |
|
|
Serial Port Serial Port specifies whether to use the Onboard or MXP serial port. |
|
|
PID |
|
|
ArmExtend |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
ArmRotate |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
Drive |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
DriveGyro Kp ((in/sec)/deg) |
|
|
CameraPole |
|
|
P |
|
|
I |
|
|
D |
|
|
F |
|
|
IZone |
|
|
Solenoids |
|
|
ArmClaw |
|
|
Forward Channel |
|
|
Invert |
|
|
Reverse Channel |
|
|
IntakeExtend |
|
|
Forward Channel |
|
|
Invert |
|
|
Reverse Channel |
|
|
IntakeOpen |
|
|
Forward Channel |
|
|
Invert |
|
|
Reverse Channel |
|
|
Shifter |
|
|
Forward Channel |
|
|
Invert |
|
|
Reverse Channel |
|
|
RobotDimensions |
|
|
Length |
|
|
Height |
|
|
HeightOfBumpers |
|
|
DistanceFromFrameEdgeToPyramid |
|
|
HeightOfFrameToIntake |
|
|
EdgeOfFrameToOrigin |
|
|
ArmHomePosition |
|
|
Angle (rad) |
|
|
Radius (in) |
|
|
SelfieStickParams |
|
|
Home Height (in) |
|
|
CruiseVelocity |
|
|
MaxAccel |
|
|
Low Height (in) |
|
|
High Height (in) |
|
|
Mid Height (in) |
|
|
Enable Compressor |
"SelectRobotConfig.vi History"
Current Revision: 63