|
|
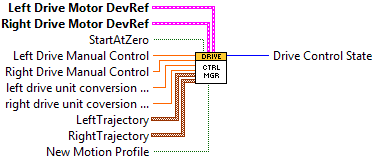
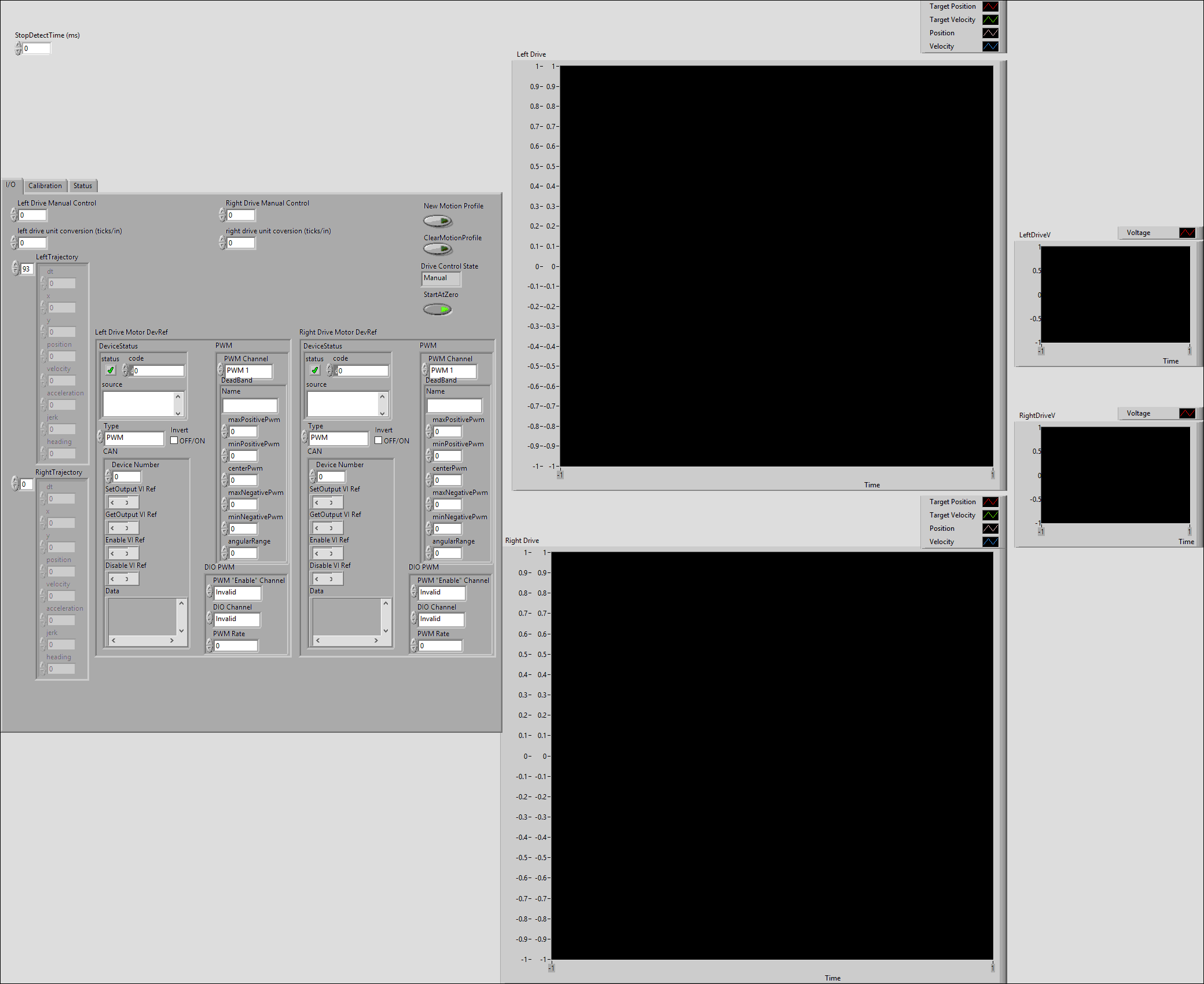
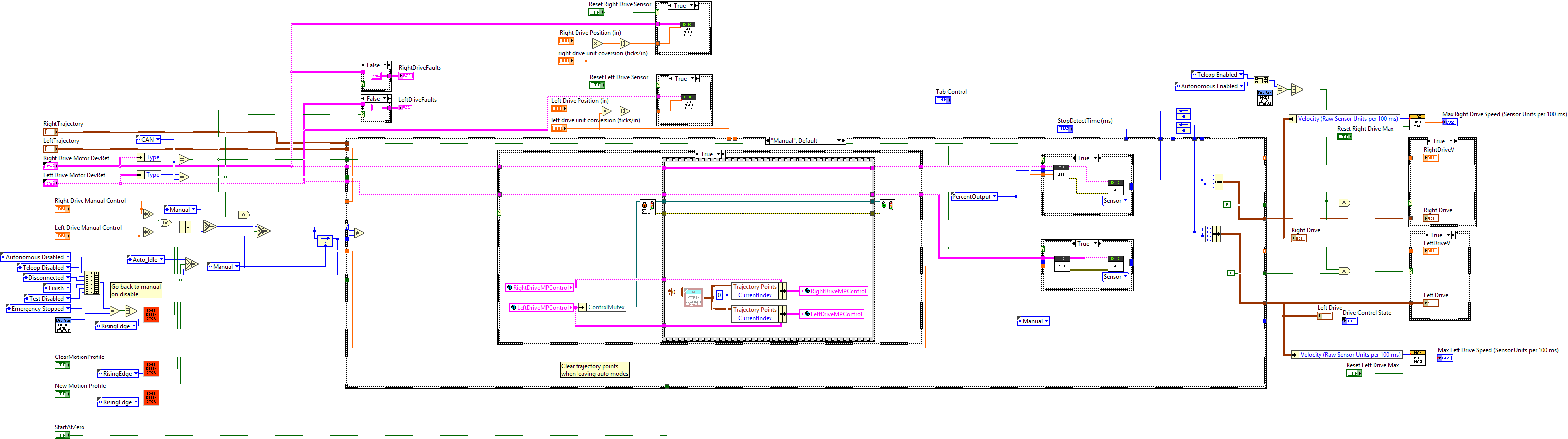
Right Drive Manual Control |
|
|
Left Drive Manual Control |
|
|
New Motion Profile |
|
|
Left Drive Motor DevRef |
|
|
DeviceStatus |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
Type |
|
|
PWM |
|
|
PWM Channel |
|
|
DeadBand |
|
|
Name |
|
|
maxPositivePwm |
|
|
minPositivePwm |
|
|
centerPwm |
|
|
maxNegativePwm |
|
|
minNegativePwm |
|
|
angularRange |
|
|
CAN |
|
|
Device Number |
|
|
SetOutput VI Ref |
|
|
GetOutput VI Ref |
|
|
Enable VI Ref |
|
|
Disable VI Ref |
|
|
Data |
|
|
Invert |
|
|
DIO PWM |
|
|
PWM "Enable" Channel |
|
|
DIO Channel |
|
|
PWM Rate |
|
|
Right Drive Motor DevRef |
|
|
DeviceStatus |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
Type |
|
|
PWM |
|
|
PWM Channel |
|
|
DeadBand |
|
|
Name |
|
|
maxPositivePwm |
|
|
minPositivePwm |
|
|
centerPwm |
|
|
maxNegativePwm |
|
|
minNegativePwm |
|
|
angularRange |
|
|
CAN |
|
|
Device Number |
|
|
SetOutput VI Ref |
|
|
GetOutput VI Ref |
|
|
Enable VI Ref |
|
|
Disable VI Ref |
|
|
Data |
|
|
Invert |
|
|
DIO PWM |
|
|
PWM "Enable" Channel |
|
|
DIO Channel |
|
|
PWM Rate |
|
|
ClearMotionProfile |
|
|
Reset Right Drive Max |
|
|
Reset Left Drive Max |
|
|
Reset Left Drive Sensor |
|
|
Reset Right Drive Sensor |
|
|
right drive unit coversion (ticks/in) |
|
|
left drive unit conversion (ticks/in) |
|
|
Left Drive Position (in) |
|
|
Right Drive Position (in) |
|
|
Tab Control |
|
|
StartAtZero |
|
|
RightTrajectory |
|
|
segment |
|
|
dt double |
|
|
x double |
|
|
y double |
|
|
position double |
|
|
velocity double |
|
|
acceleration double |
|
|
jerk double |
|
|
heading double |
|
|
LeftTrajectory |
|
|
segment |
|
|
dt double |
|
|
x double |
|
|
y double |
|
|
position double |
|
|
velocity double |
|
|
acceleration double |
|
|
jerk double |
|
|
heading double |
|
|
StopDetectTime (ms) |
|
|
Drive Control State |
|
|
Left Drive |
|
|
Right Drive |
|
|
Right Drive |
|
|
Position (Sensor Units) |
|
|
Velocity (Sensor Units per 100 ms) |
|
|
Position (Raw Sensor Units) |
|
|
Velocity (Raw Sensor Units per 100 ms) |
|
|
Left Drive |
|
|
Position (Sensor Units) |
|
|
Velocity (Sensor Units per 100 ms) |
|
|
Position (Raw Sensor Units) |
|
|
Velocity (Raw Sensor Units per 100 ms) |
|
|
RightDriveFaults |
|
|
Under Voltage |
|
|
Forward Limit Switch |
|
|
Reverse Limit Switch |
|
|
Forward Soft Limit |
|
|
Reverse Soft Limit |
|
|
Hardware Failure |
|
|
Reset During Enable |
|
|
Sensor Overflow |
|
|
Sensor Out of Phase |
|
|
Hardware ESD Reset |
|
|
Remote Loss of Signal |
|
|
LeftDriveFaults |
|
|
Under Voltage |
|
|
Forward Limit Switch |
|
|
Reverse Limit Switch |
|
|
Forward Soft Limit |
|
|
Reverse Soft Limit |
|
|
Hardware Failure |
|
|
Reset During Enable |
|
|
Sensor Overflow |
|
|
Sensor Out of Phase |
|
|
Hardware ESD Reset |
|
|
Remote Loss of Signal |
|
|
Max Left Drive Speed (Sensor Units per 100 ms) |
|
|
Max Right Drive Speed (Sensor Units per 100 ms) |
|
|
RightDriveV |
|
|
LeftDriveV |
|
|
Right Error |
|
|
Left Error |


"DriveControlManager.vi History"
Current Revision: 132