This VI is called each time a disabled packet is received from the DS. It is often used to prepare for the next robot mode, to calibrate sensors, etc.
|
|
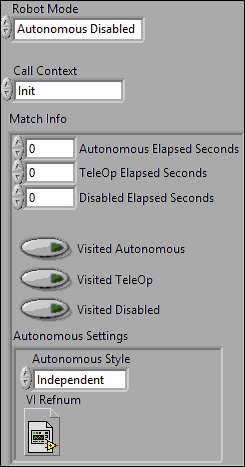
Call Context Derived Robot State returns the allowed derived robot state for the current phase of competition. Options include Init, Execute, and Stop. |
|
|
Robot Mode Robot Mode returns the allowed robot mode for the rules of the current phase of competition. Options include Autonomous Disabled, Autonomous Enabled, Teleop Disabled, and Teleop Enabled. |
|
|
Match Info |
|
|
Autonomous Elapsed Seconds |
|
|
TeleOp Elapsed Seconds |
|
|
Disabled Elapsed Seconds |
|
|
Visited Autonomous |
|
|
Visited TeleOp |
|
|
Visited Disabled |
|
|
Autonomous Settings |
|
|
Autonomous Style |
|
|
VI Refnum |

"Disabled.vi History"
Current Revision: 72