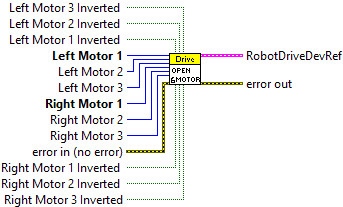
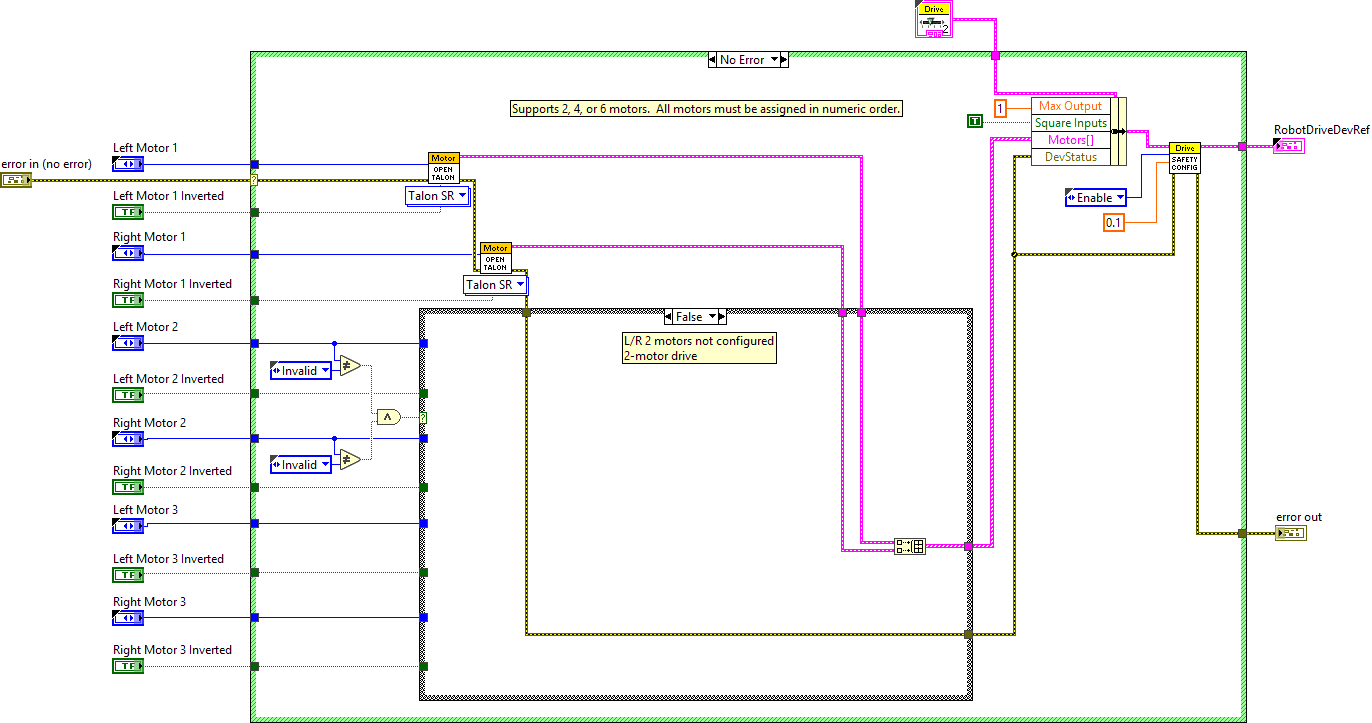
Opens a reference to the robot drive for a two-, four-, or six-motor robot using Talon SR motor controllers connected via PWM.
For 2-motor drive, connect Left Motor 1 and Right Motor 1.
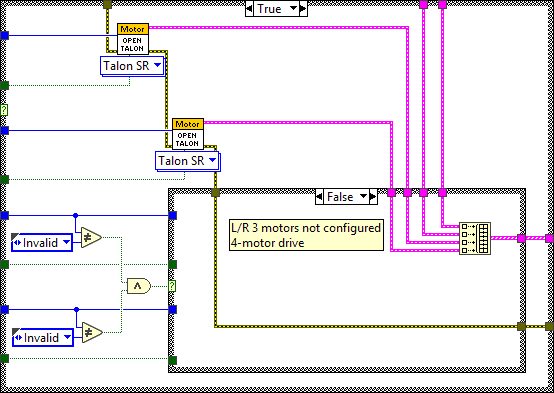
For 4-motor drive, connect Left Motor 2 and Right Motor 2 in addition to the 2-motor drive connections.
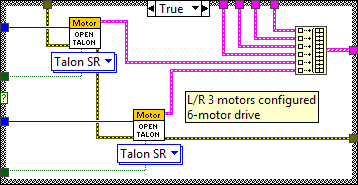
For 6-motor drive, connect Left Motor 3 and Right Motor 3 in addition to the 4-motor drive connections.
Inversions are optional and are set to false if disconnected.
This software is licensed. Open the labview\readme\WPI Robotics Library Open Source License.txt file for more information.
|
|
Left Motor 1 Inverted Rear Left Motor Inverted specifies the direction in which the rear left motor moves. When Rear Left Motor Inverted is FALSE, the rear left motor moves forward. When Rear Left Motor Inverted is TRUE, the rear left motor moves in reverse. |
|
|
Right Motor 1 Inverted Rear Right Motor Inverted specifies the direction in which the rear right motor moves. When Rear Right Motor Inverted is FALSE, the rear right motor moves forward. When Rear Right Motor Inverted is TRUE, the rear right motor moves in reverse. |
|
|
Left Motor 2 Inverted Front Left Motor Inverted sets the direction in which the front left motor runs. Front Left Motor Inverted specifies FALSE for forward and TRUE for reverse. |
|
|
Right Motor 2 Inverted Front Right Motor Inverted sets the direction in which the front right motor runs. Front Right Motor Inverted specifies FALSE for forward and TRUE for reverse. |
|
|
error in (no error) error in (no error) describes error conditions that occur before this node runs. The default is no error. If an error occurred before this node runs, the node passes the error in (no error) value to error out. This node runs normally only if no error occurred before this node runs. If an error occurs while this node runs, it runs normally and sets its own error status in error out. Use the Simple Error Handler or General Error Handler VIs to display the description of the error code. Use exception control to treat what is normally an error as no error or to treat a warning as an error. Use error in (no error) and error out to check errors and to specify execution order by wiring error out from one node to error in (no error) of the next node. |
|
|
status status is TRUE (X) if an error occurred before this node ran or FALSE (checkmark) to indicate a warning or that no error occurred before this node ran. The default is FALSE. |
|
|
code code is the error or warning code. The default is 0. If status is TRUE, code is an error code. If status is FALSE, code is 0 or a warning code. |
|
|
source source specifies the origin of the error or warning and is, in most cases, the name of the node that produced the error or warning. The default is an empty string. |
|
|
Left Motor 3 Inverted Front Left Motor Inverted sets the direction in which the front left motor runs. Front Left Motor Inverted specifies FALSE for forward and TRUE for reverse. |
|
|
Right Motor 3 Inverted Front Right Motor Inverted sets the direction in which the front right motor runs. Front Right Motor Inverted specifies FALSE for forward and TRUE for reverse. |
|
|
Left Motor 1 PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Right Motor 1 PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Left Motor 2 PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Right Motor 2 PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Left Motor 3 PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Right Motor 3 PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
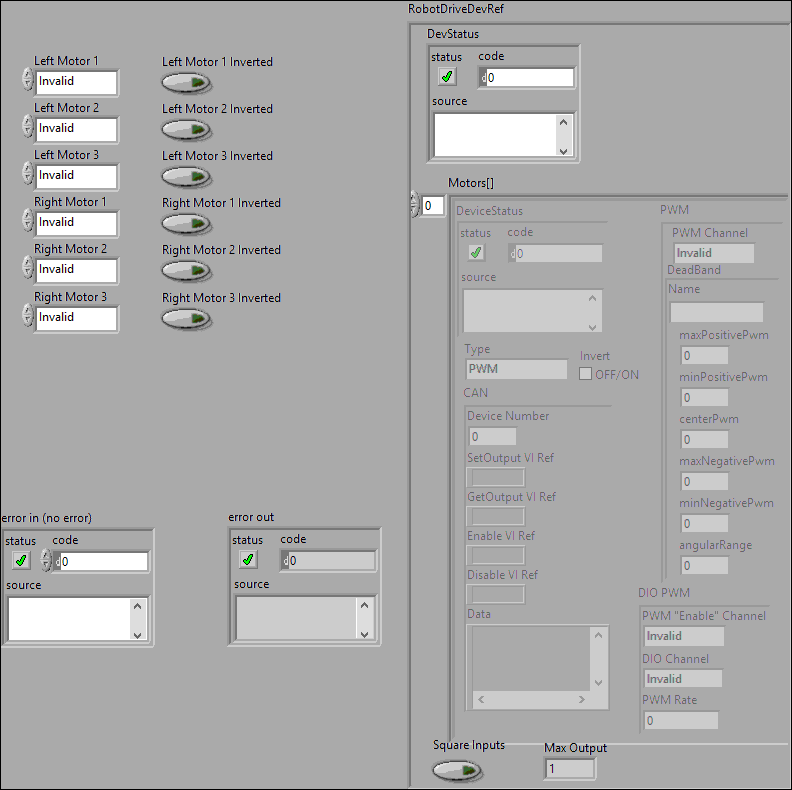
RobotDriveDevRef RobotDriveDevRef returns a reference to the robot drive you want to use. |
|
|
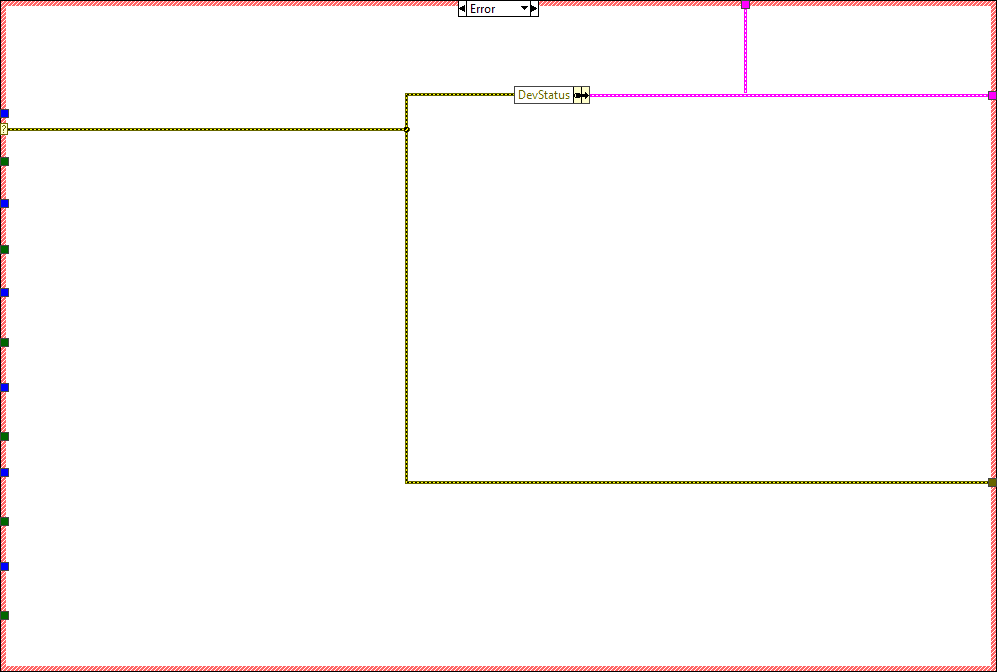
DevStatus error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
Motors[] |
|
|
SingleMotorRef PWMDeviceRef returns a reference to the PWM. |
|
|
DeviceStatus |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
Type |
|
|
PWM |
|
|
PWM Channel |
|
|
DeadBand |
|
|
Name |
|
|
maxPositivePwm |
|
|
minPositivePwm |
|
|
centerPwm |
|
|
maxNegativePwm |
|
|
minNegativePwm |
|
|
angularRange |
|
|
CAN |
|
|
Device Number |
|
|
SetOutput VI Ref |
|
|
GetOutput VI Ref |
|
|
Enable VI Ref |
|
|
Disable VI Ref |
|
|
Data |
|
|
Invert |
|
|
DIO PWM |
|
|
PWM "Enable" Channel |
|
|
DIO Channel |
|
|
PWM Rate |
|
|
Square Inputs |
|
|
Max Output |
|
|
error out error out contains error information. If error in indicates that an error occurred before this VI or function ran, error out contains the same error information. Otherwise, it describes the error status that this VI or function produces. Right-click the error out front panel indicator and select Explain Error from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred before this node ran or FALSE (checkmark) to indicate a warning or that no error occurred before this node ran. |
|
|
code code is the error or warning code. If status is TRUE, code is an error code. If status is FALSE, code is 0 or a warning code. |
|
|
source source specifies the origin of the error or warning and is, in most cases, the name of the node that produced the error or warning. |
"ArgosLib.lvlib:RobotDriveOpen6MotorWithTalonSR.vi History"
Current Revision: 92