|
|
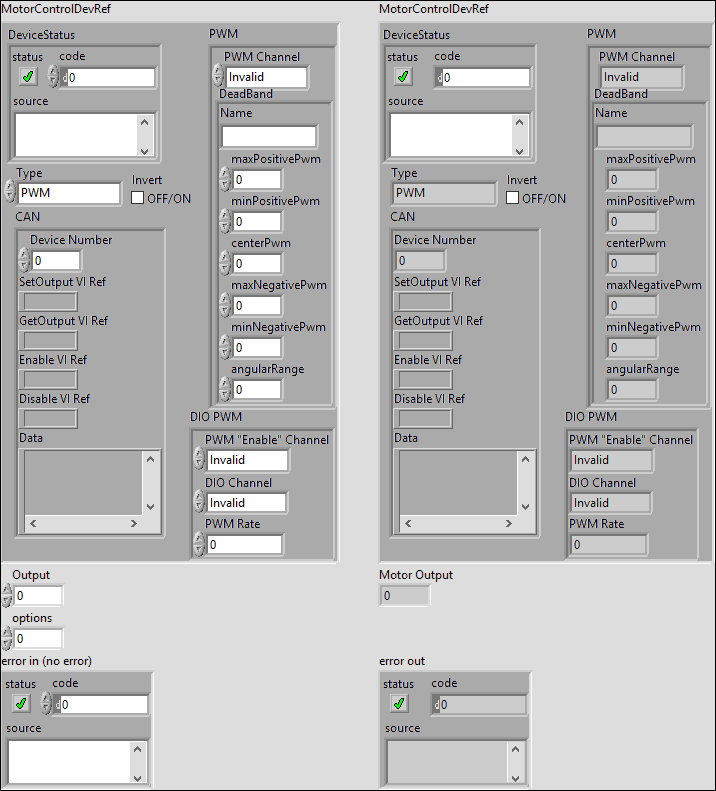
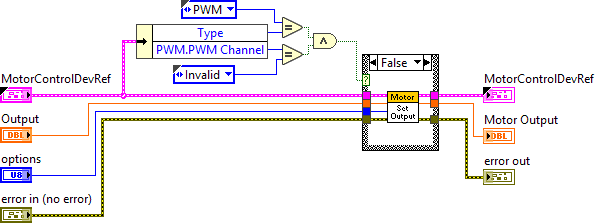
MotorControlDevRef MotorControlDevRef specifies a reference to the motor controller you want to use. |
|
|
DeviceStatus |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
Type |
|
|
PWM |
|
|
PWM Channel |
|
|
DeadBand |
|
|
Name |
|
|
maxPositivePwm |
|
|
minPositivePwm |
|
|
centerPwm |
|
|
maxNegativePwm |
|
|
minNegativePwm |
|
|
angularRange |
|
|
CAN |
|
|
Device Number |
|
|
SetOutput VI Ref |
|
|
GetOutput VI Ref |
|
|
Enable VI Ref |
|
|
Disable VI Ref |
|
|
Data |
|
|
Invert |
|
|
DIO PWM |
|
|
PWM "Enable" Channel |
|
|
DIO Channel |
|
|
PWM Rate |
|
|
Output Output specifies the output value or set-point for the motor controller. If you use a Jaguar or Victor motor controller connected to PWM, the scaled value can range from -1.0 to 1.0. If you use a CAN Jaguar, the scale and the units depend on the mode the Jaguar is in. In Percent VBus mode, the range is the same as the PWM interface. In Voltage, Current, Speed, and Position modes, the Output is specified in engineering units (Volts, Amps, Rotations/Minute, and Rotations respectively). |
|
|
options When using CAN Jaguar, <b>Sync Group / Parameter Slot</b> allows you to specify a group of motor controllers to be updated simultaneously by calling the Sync Output VI. This is a bitmask. When a value of 0 is used, the output is updated immediately. When using the CAN Talon SRX, <b>Sync Group / Parameter Slot</b> allows you to dynamically specify which Parameter Slot to pull closed-loop parameters from. This allows for simple and fast switching between 2 different sets of closed-loop control parameters persisted in the flash of the controller. |
|
|
error in (no error) error in (no error) describes error conditions that occur before this node runs. The default is no error. If an error occurred before this node runs, the node passes the error in (no error) value to error out. This node runs normally only if no error occurred before this node runs. If an error occurs while this node runs, it runs normally and sets its own error status in error out. Use the Simple Error Handler or General Error Handler VIs to display the description of the error code. Use exception control to treat what is normally an error as no error or to treat a warning as an error. Use error in (no error) and error out to check errors and to specify execution order by wiring error out from one node to error in (no error) of the next node. |
|
|
status status is TRUE (X) if an error occurred before this node ran or FALSE (checkmark) to indicate a warning or that no error occurred before this node ran. The default is FALSE. |
|
|
code code is the error or warning code. The default is 0. If status is TRUE, code is an error code. If status is FALSE, code is 0 or a warning code. |
|
|
source source specifies the origin of the error or warning and is, in most cases, the name of the node that produced the error or warning. The default is an empty string. |
|
|
MotorControlDevRef MotorControlDevRef returns a reference to the motor controller you want to use. |
|
|
DeviceStatus |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
Type |
|
|
PWM |
|
|
PWM Channel |
|
|
DeadBand |
|
|
Name |
|
|
maxPositivePwm |
|
|
minPositivePwm |
|
|
centerPwm |
|
|
maxNegativePwm |
|
|
minNegativePwm |
|
|
angularRange |
|
|
CAN |
|
|
Device Number |
|
|
SetOutput VI Ref |
|
|
GetOutput VI Ref |
|
|
Enable VI Ref |
|
|
Disable VI Ref |
|
|
Data |
|
|
Invert |
|
|
DIO PWM |
|
|
PWM "Enable" Channel |
|
|
DIO Channel |
|
|
PWM Rate |
|
|
Motor Output Output specifies the output value or set-point for the motor controller. If you use a motor controller connected to PWM, the scaled value can range from -1.0 to 1.0. If you use a CAN Jaguar, the scale and the units depend on the mode the Jaguar is in. In Percent VBus mode, the range is the same as the PWM interface. In Voltage, Current, Speed, and Position modes, the Output is specified in engineering units (Volts, Amps, Rotations/Minute, and Rotations respectively). |
|
|
error out error out contains error information. If error in indicates that an error occurred before this VI or function ran, error out contains the same error information. Otherwise, it describes the error status that this VI or function produces. Right-click the error out front panel indicator and select Explain Error from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred before this node ran or FALSE (checkmark) to indicate a warning or that no error occurred before this node ran. |
|
|
code code is the error or warning code. If status is TRUE, code is an error code. If status is FALSE, code is 0 or a warning code. |
|
|
source source specifies the origin of the error or warning and is, in most cases, the name of the node that produced the error or warning. |

"ArgosLib.lvlib:MotorSetInvalidHandler.vi History"
Current Revision: 6