|
|
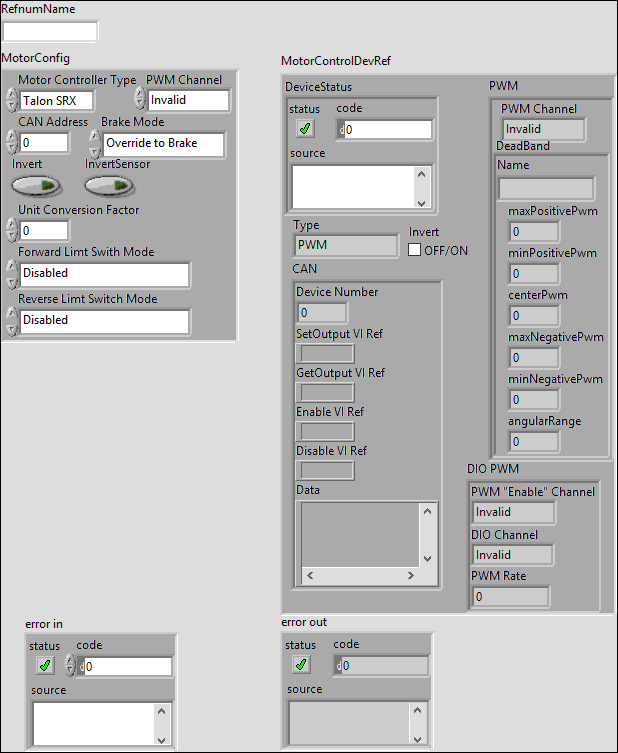
RefnumName |
|
|
MotorConfig |
|
|
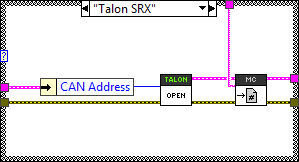
CAN Address |
|
|
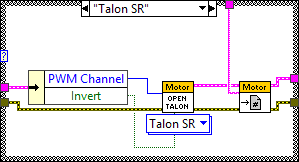
Invert |
|
|
InvertSensor |
|
|
Unit Conversion Factor |
|
|
Brake Mode |
|
|
Reverse Limt Switch Mode |
|
|
Forward Limt Swith Mode |
|
|
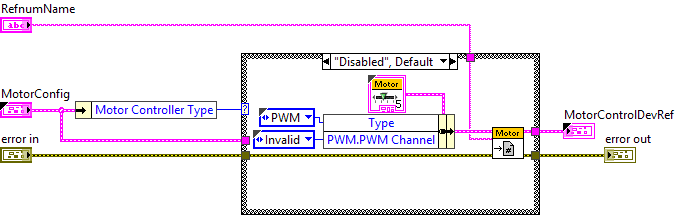
PWM Channel PWM Channel specifies the channel you want to use for the motor controller. Select a value from PWM 0 to PWM 9 or from PWM MXP 0 to PWM MXP 9. The default is PWM 0. If PWM Channel is Invalid, this VI returns an error. |
|
|
Motor Controller Type |
|
|
error in error in can accept error information wired from VIs previously called. Use this information to decide if any functionality should be bypassed in the event of errors from other VIs. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
MotorControlDevRef PhoenixMotorControlDevRef returns a reference to the motor controller. |
|
|
DeviceStatus |
|
|
status status is TRUE (X) if an error occurred or FALSE (checkmark) to indicate a warning or that no error occurred. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
code code is the error or warning code. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
source source describes the origin of the error or warning. Right-click the error in control on the front panel and select Explain Error or Explain Warning from the shortcut menu for more information about the error. |
|
|
Type |
|
|
PWM |
|
|
PWM Channel |
|
|
DeadBand |
|
|
Name |
|
|
maxPositivePwm |
|
|
minPositivePwm |
|
|
centerPwm |
|
|
maxNegativePwm |
|
|
minNegativePwm |
|
|
angularRange |
|
|
CAN |
|
|
Device Number |
|
|
SetOutput VI Ref |
|
|
GetOutput VI Ref |
|
|
Enable VI Ref |
|
|
Disable VI Ref |
|
|
Data |
|
|
Invert |
|
|
DIO PWM |
|
|
PWM "Enable" Channel |
|
|
DIO Channel |
|
|
PWM Rate |
|
|
error out error out contains error information. If error in indicates that an error occurred before this VI or function ran, error out contains the same error information. Otherwise, it describes the error status that this VI or function produces. Right-click the error out front panel indicator and select Explain Error from the shortcut menu for more information about the error. |
|
|
status status is TRUE (X) if an error occurred before this node ran or FALSE (checkmark) to indicate a warning or that no error occurred before this node ran. |
|
|
code code is the error or warning code. If status is TRUE, code is an error code. If status is FALSE, code is 0 or a warning code. |
|
|
source source specifies the origin of the error or warning and is, in most cases, the name of the node that produced the error or warning. |
"ArgosLib.lvlib:MotorControllerOpen.vi History"
Current Revision: 8