|
|
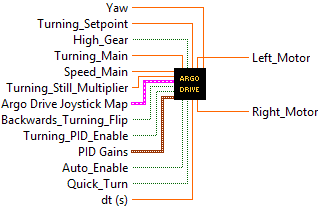
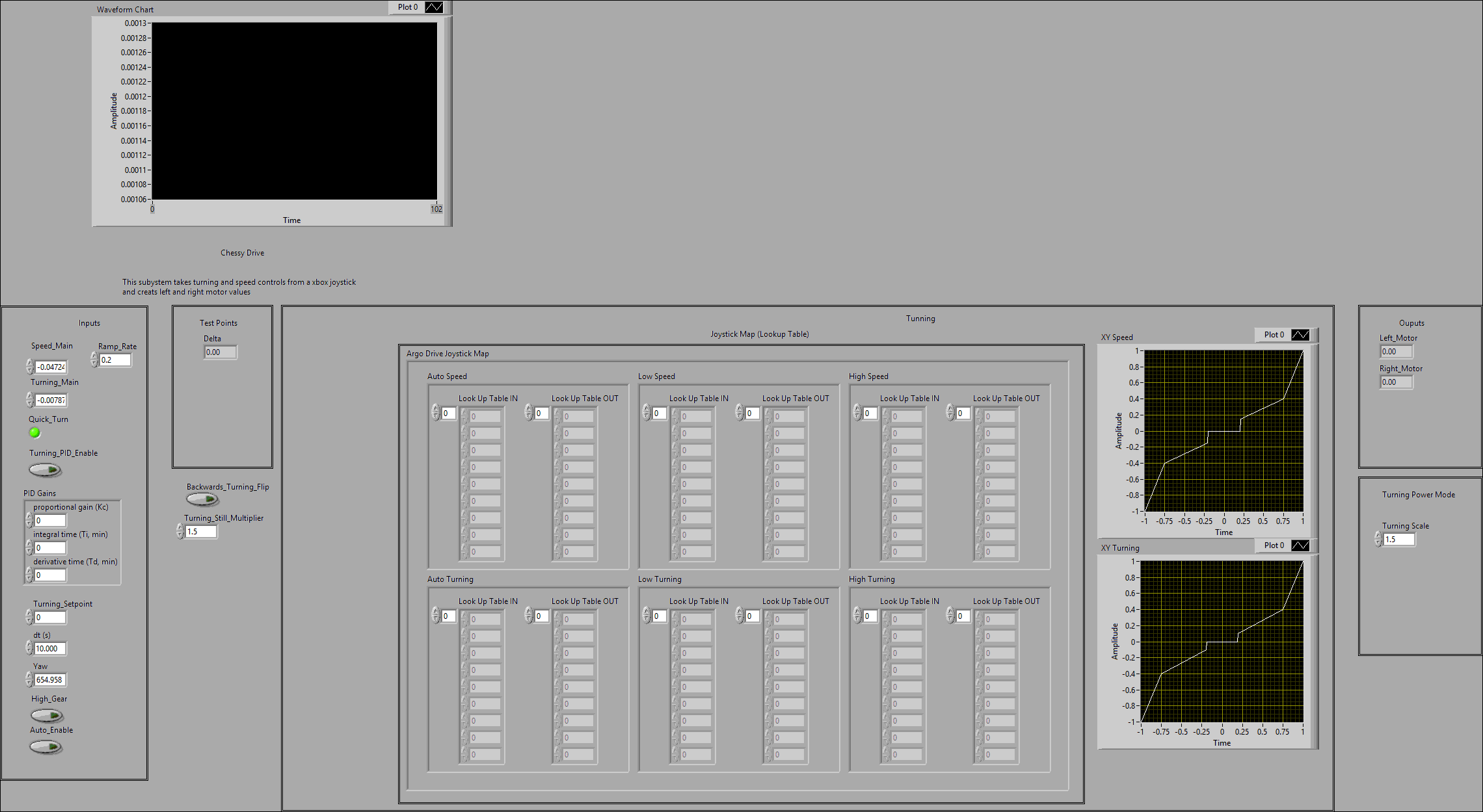
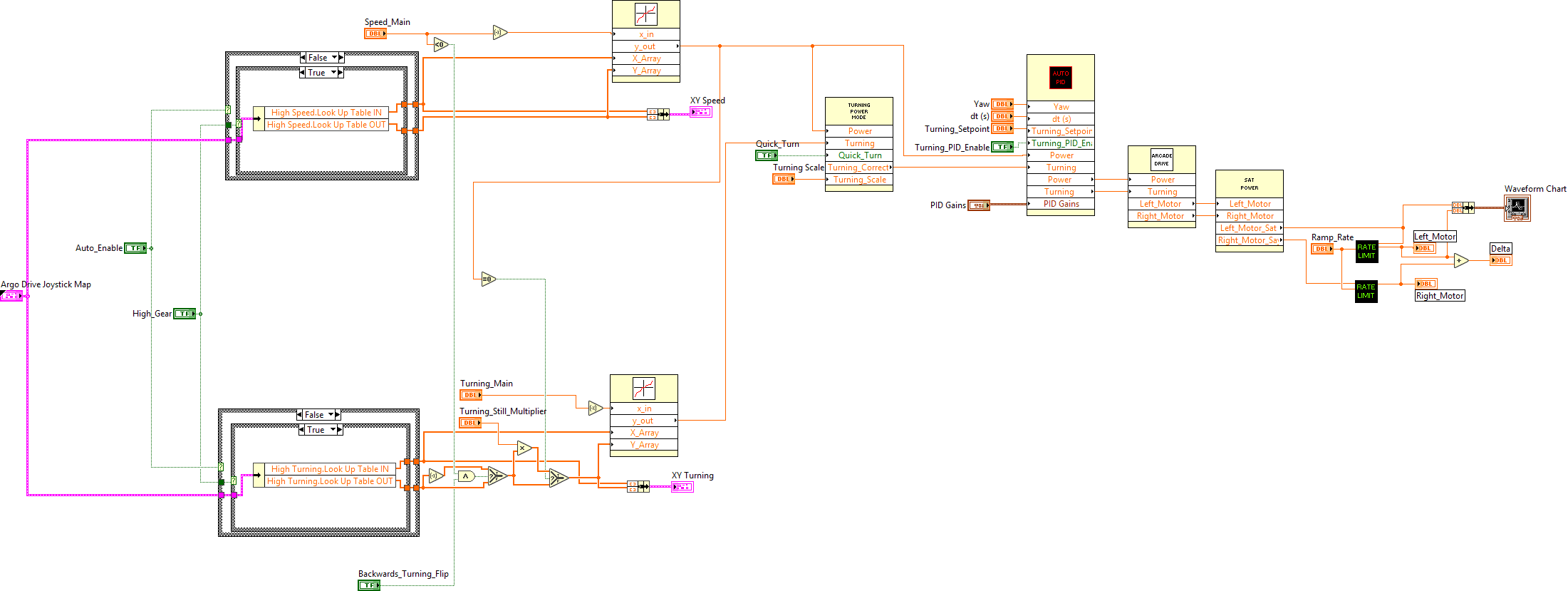
Speed_Main |
|
|
Turning_Main |
|
|
Quick_Turn |
|
|
Turning Scale |
|
|
PID Gains |
|
|
proportional gain (Kc) |
|
|
integral time (Ti, min) |
|
|
derivative time (Td, min) |
|
|
Turning_PID_Enable |
|
|
Turning_Setpoint |
|
|
dt (s) dt (s) specifies the loop-cycle time, or interval in seconds, at which this VI is called. If dt (s) is less than or equal to zero, this VI calculates the time since it was last called using an internal timer with 1 ms resolution. If dt (s) must be less than 1 ms, specify the value explicitly. The default is -1. |
|
|
Yaw |
|
|
High_Gear |
|
|
Auto_Enable |
|
|
Ramp_Rate |
|
|
Argo Drive Joystick Map |
|
|
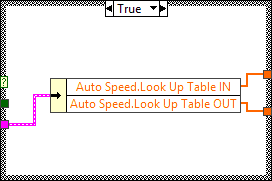
Auto Speed |
|
|
Look Up Table OUT |
|
|
Numeric |
|
|
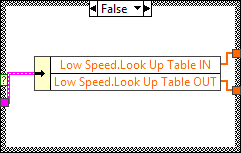
Look Up Table IN |
|
|
Numeric |
|
|
Low Speed |
|
|
Look Up Table OUT |
|
|
Numeric |
|
|
Look Up Table IN |
|
|
Numeric |
|
|
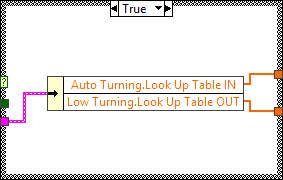
Auto Turning |
|
|
Look Up Table OUT |
|
|
Numeric |
|
|
Look Up Table IN |
|
|
Numeric |
|
|
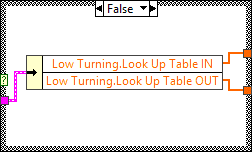
Low Turning |
|
|
Look Up Table OUT |
|
|
Numeric |
|
|
Look Up Table IN |
|
|
Numeric |
|
|
High Speed |
|
|
Look Up Table OUT |
|
|
Numeric |
|
|
Look Up Table IN |
|
|
Numeric |
|
|
High Turning |
|
|
Look Up Table OUT |
|
|
Numeric |
|
|
Look Up Table IN |
|
|
Numeric |
|
|
Backwards_Turning_Flip |
|
|
Turning_Still_Multiplier |
|
|
Left_Motor |
|
|
Right_Motor |
|
|
Delta |
|
|
XY Speed |
|
|
XY Turning |
|
|
Waveform Chart |
"ArgosLib.lvlib:Argo_Drive.vi History"
Current Revision: 92